
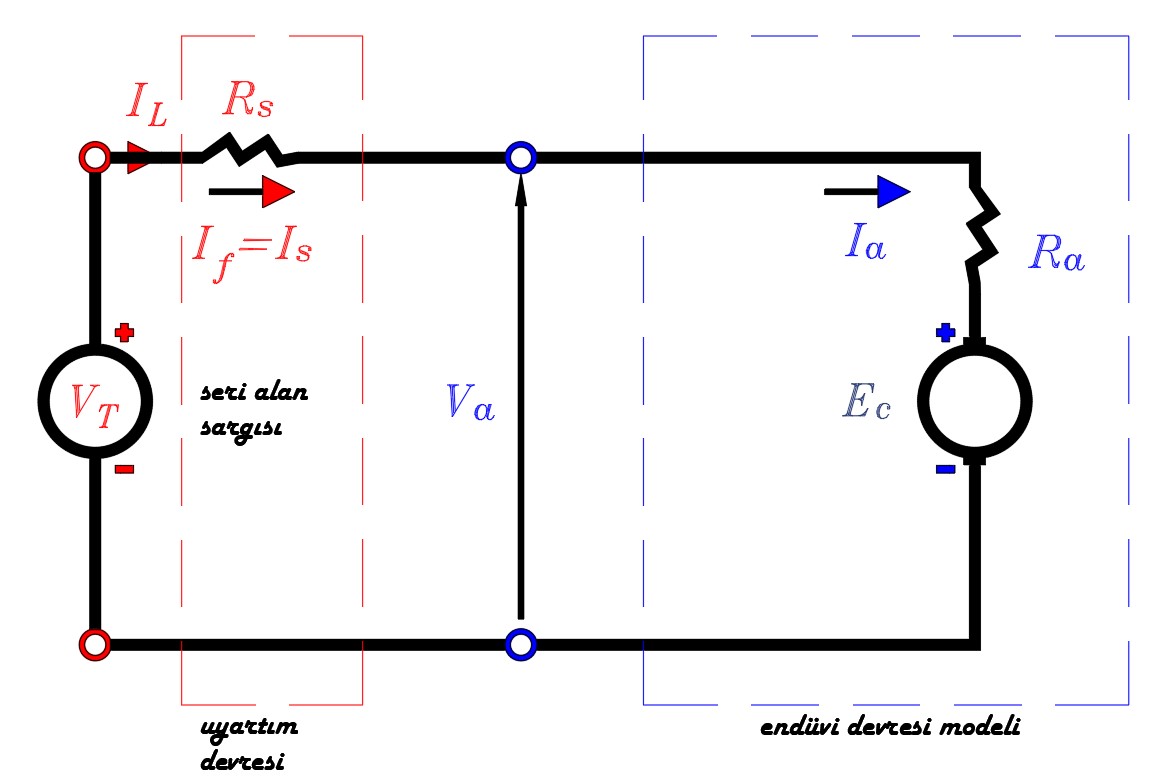
DC seri motorlarda alan sargısı ile endüvi sargısı seri bağlıdır. Alan sargısı RϞ ile gösterilir. Aşağıdaki modelde görüldüğü gibi endüvi akımı, uyartım (alan) akımı ve yük akımı aynıdır. Uç gerilimi VT ise endüvi uç gerilimi ile uyartım direncine düşen gerilimlerin toplamına eşittir.
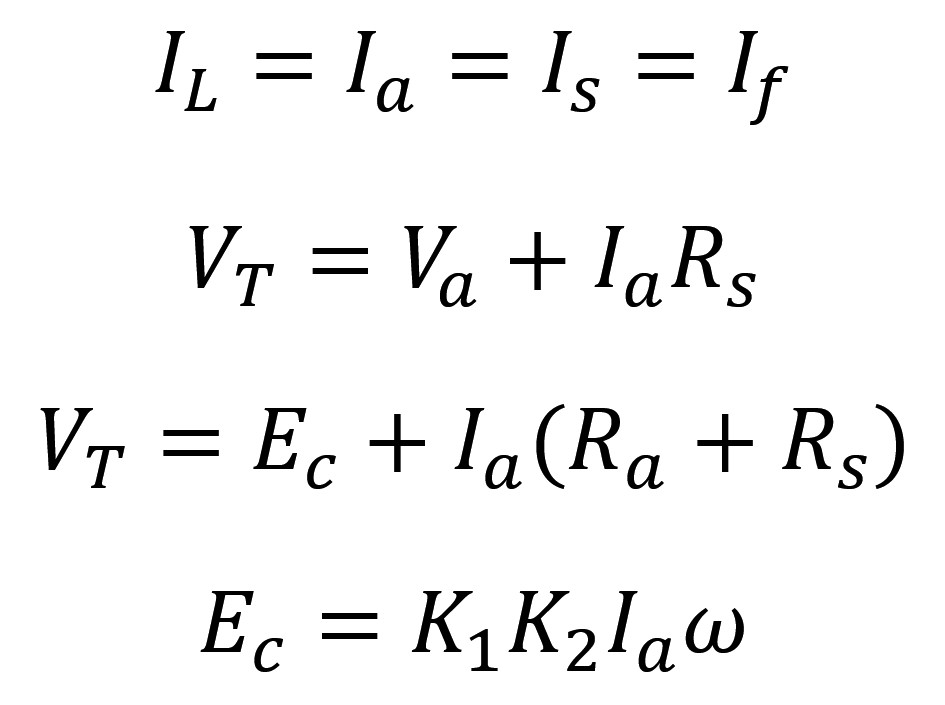
olarak yazılabilir. Bundan sonra DC seri motorun performans analizi için kullanışlı denklemler çıkarılabilir. DC seri motorun temel performans karakteristikleri çıkış değişkenlerine göre çıkarılır. Pratikte endüvi akımı, moment ve hızın çıkış gücüne karşı değişimini gösteren performans karakteristiği istenir.
ENDÜVİ GÜÇ-AKIM (Pa-Ia) KARAKTERİSTİĞİ
Endüvide üretilen güç;
Olarak verilir. Denklemde Ec değeri yerine konulursa;

Elde edilir. Belirli terminal geriliminde ve makine parametrelerinde endüvide üretilen güç endüvi akımı ile ikinci dereceden bir parabolik olarak değişir. Verilen Pa gücüne göre yukarıdaki denklemin iki çözümü vardır. Yukarıdaki denklem yeniden düzenlenerek;

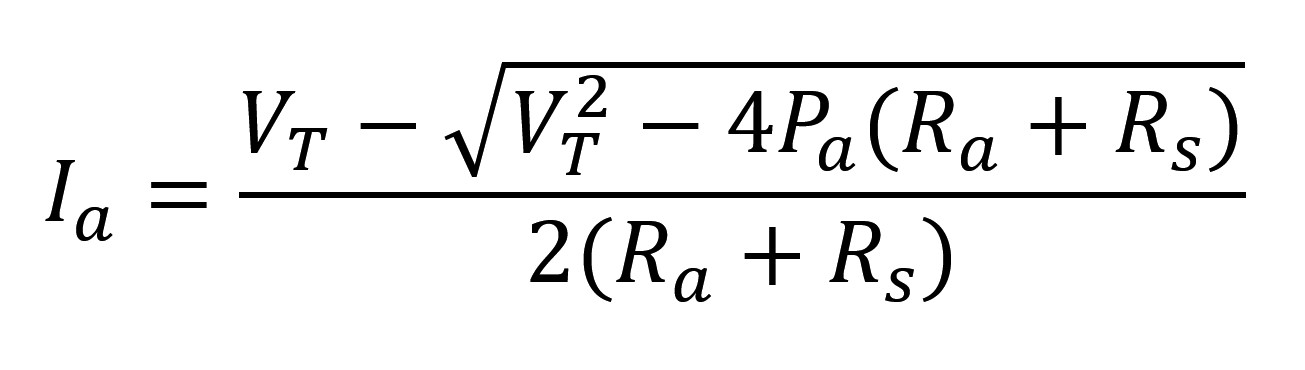
Haline getirilir. Ia’nın çözümü için;
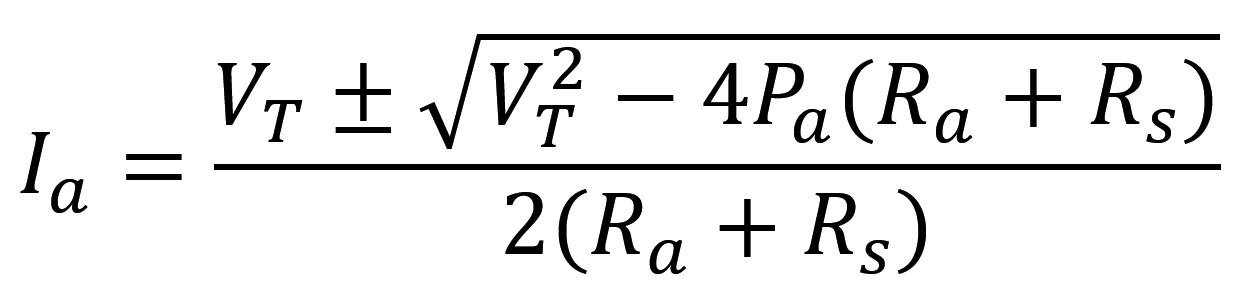
Denklemi elde edilir. Bu denklemde Pa’nın sadece bir değerinde Ia’nın bir çözümü vardır. Bu şartlar karekök içindeki terimlerin sıfır olmasını gerektirir.
Bunun sonucunda motor tarafından sağlanabilecek en yüksek güç;
Olur ve bu güce karşılık endüvi akımı;
Olarak bulunur. Bu denklemin doğruluğunu hesaplamak için denkleminin Ia akımına göre türevi alınıp, sıfıra eşitlenirse;
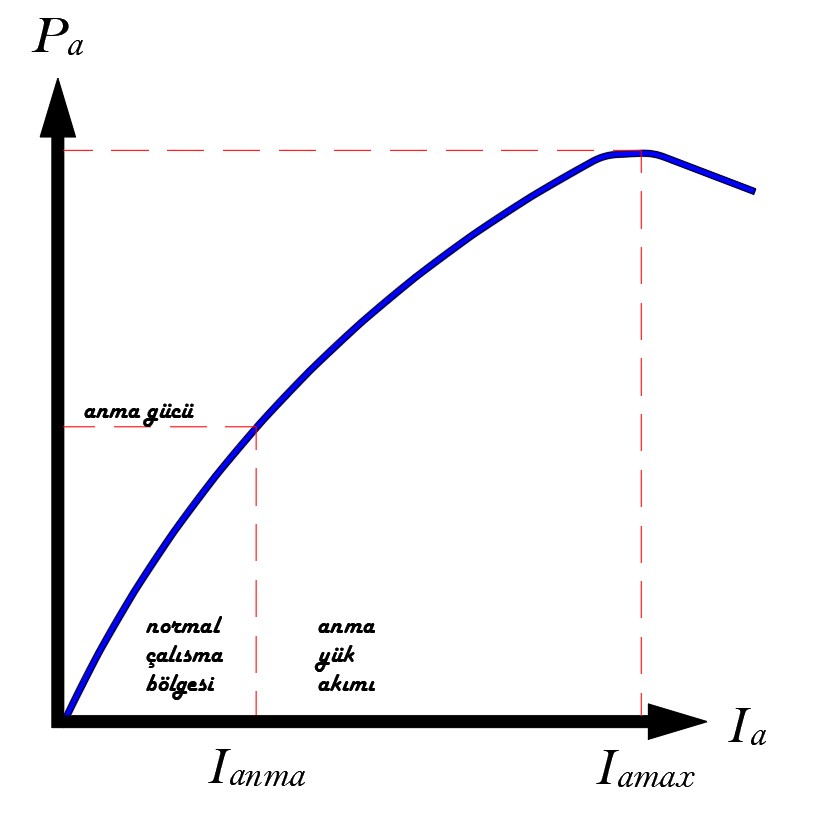
Elde edilen sonuç Iamax denklemini verir. DC motorun çalışma aralığı maksimum endüvi gücünden oldukça aşağıdadır. Motorun normal çalışma bölgesinde Ia denklemindeki karekök işareti negatif alınır.
Pa denklemindeki endüvi ve seri alan dirençleri ihmal edilirse, Ia akımının yaklaşık bir değeri;
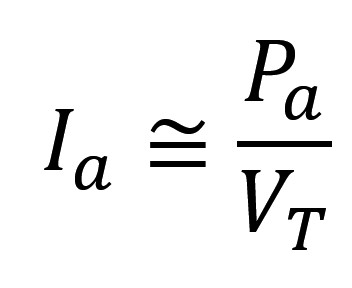
Olarak hesaplanır. Bu basit ve kullanışlı akım denklemi çok karışık olan bir önceki Ia denkleminden daha düşük bir akım değeri verir. Fakat düşük Pa güçlerinde akım hatası çok azdır. DA seri motorun endüvi akımı ile değişimi yukarıdaki grafikte çizilmiştir.
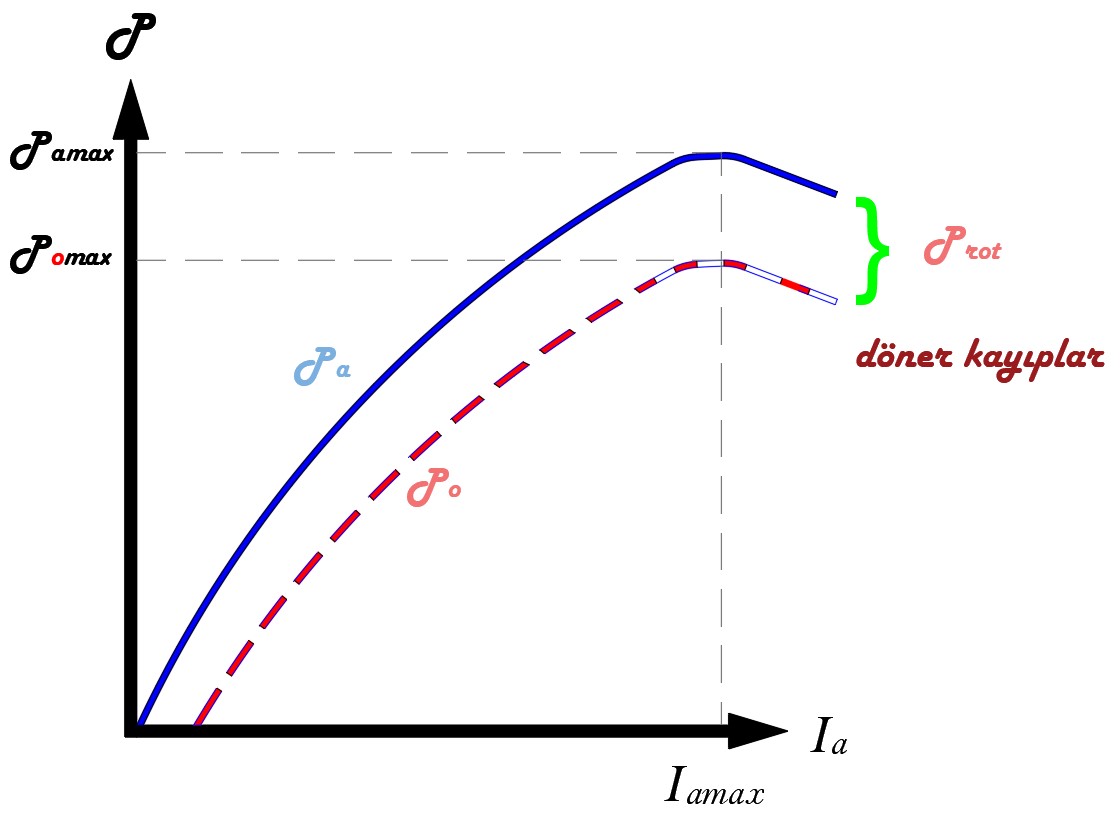
Motorun çıkış veya mil gücü endüvide üretilen güçten döner kayıpların çıkarılması ile elde edilir ve aşağıdaki grafikte gösteildiği gibidir.
ÖRNEK SORU:
10HP, 125V DC seri motorun endüvi direnci ile seri alan direnci toplamı 0.2Ω’dur. Prot=0 kabul edilirse;
a) Tam yükteki endüvi akımını,
b) Maksimum endüvi gücü ve karşılığı olan endüvi akımını,
c) Yarı yükteki endüvi akımını hesaplayınız.
ÇÖZÜM:
a) Tam yükte, döner kayıplar ihmal edilirse, endüvide üretilen güç ve endüvi akımı

Eğer denklemdeki karekök işareti pozitif alınsaydı, ikinci çözümde Ia=558A olurdu. Yaklaşık akım denklemindeki çözümde ise Ia=59,7A olarak 7 amperlik akım hesaplanır.
b) Maksimum endüvi gücü için akım;

Bu akım değerine göre maksimum endüvi gücü;

c) Yarı yükte;

Bu güç değerine karşılık endüvi akımı;

Yaklaşık akım denkleminden yaklaşık akım değeri ise;
Olarak bulunur. İki farklı hesaplamadan elde edilen akımlar arasındaki fark veya hata 31,4-29,8=1,56A olarak bulunur.
ENDÜVİ MOMENT-HIZ KARAKTERİSTİĞİ
Endüvide üretilen moment (iç moment);
Ve böylelikle aynı zamanda;
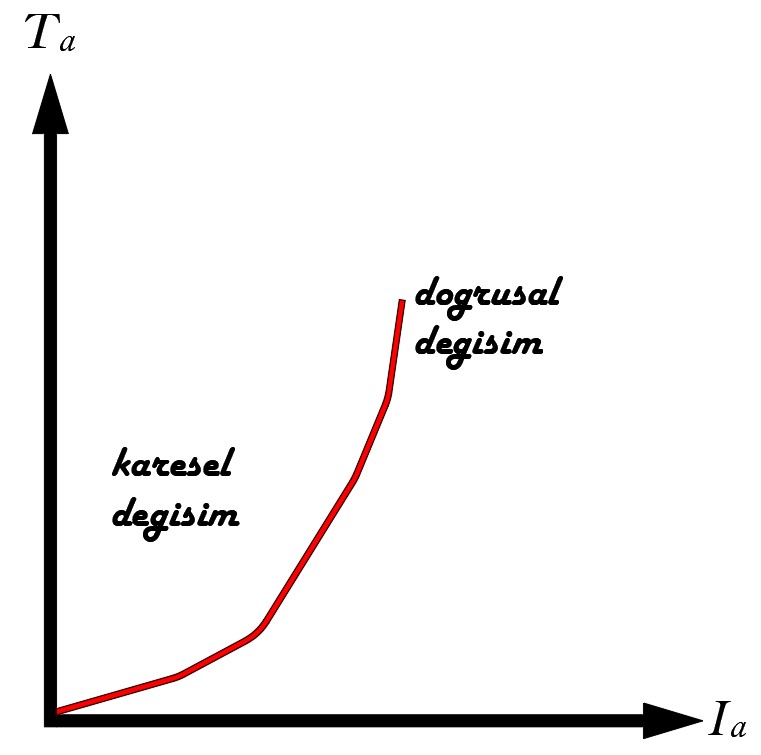
Şeklinde de ifade edilebilir. Aşağıdaki grafikte görüldüğü gibi nüvenin doymadığı bölgede moment endüvi akımının karesi ile değişirken doyum bölgesinde ise moment akımla doğrusal olarak artar.
Son olarak ise VT ile ilgili;

Endüvi akımı terimleri ile açısal hız;
Olarak ifade edilebilir. Yukarıdaki denklemden, endüvi akımının küçük bir değerinde bile motorun çok yüksek devir yapabildiğini gösterir. Bu sebepten motor yüksüz iken çalıştırılırsa motor devir sayısı çok aşırı yükselir ve tehlikeli durumlar meydana gelebilir. Bu sakıncaya meydan vermemek için DC seri motorlar hep motor miline yükün bağlı olduğu uygulamalarda kullanılır. Örnek olarak yük asansörü, vinç, tren motorları verilebilir. Motor hızının tehlikeli olacak devirlere yükselmesini önlemek için motor devresinde merkezkaç anahtar kullanılmalıdır.
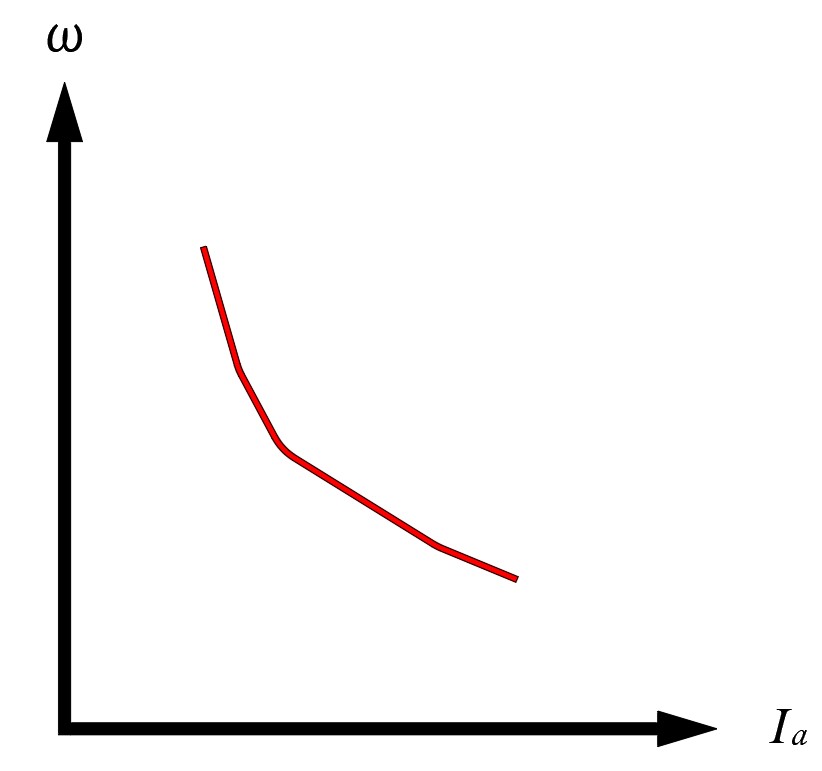
DC seri motorun endüvi akımı-hız ilişkisi yukarıdaki grafikte gösterilmiştir. Yukarıdaki denklemle birlikte endüvi akımı, açısal hız ile tanımlanabilir. (Yukarıdaki denklemden endüvi akımını çekiyoruz.)
Elde ettiğimiz bu denklem yukarıdaki VT denkleminde yerine konulursa;
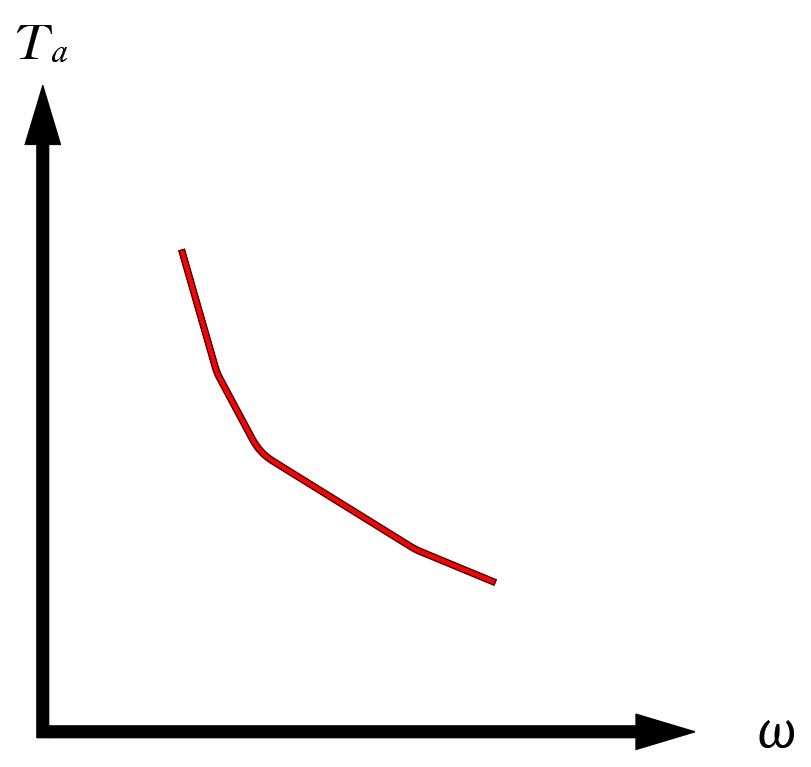
Elde ettiğimiz denklem, DC seri motorun moment-hız karakteristiğini verir ve aşağıdaki grafikte seri motorun moment hız eğrisi gösterilmiştir.
ÖRNEK SORU:
600V, DA seri motor 600 d/d ve anma yükünde çalışır Endüvi direnci 0.1Ω ve seri alan sargısı direnci 0.05Ω’dur. Tam yükte motor 195A akım çeker.
a) Tam yükteki zıt emk değerini
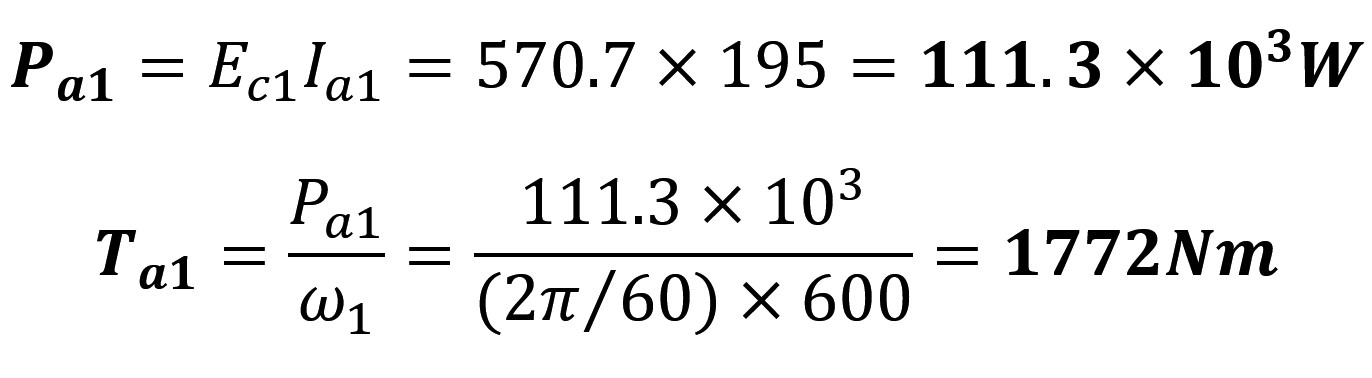
b) Tam yük altında endüvide üretilen gücü ve iç momenti
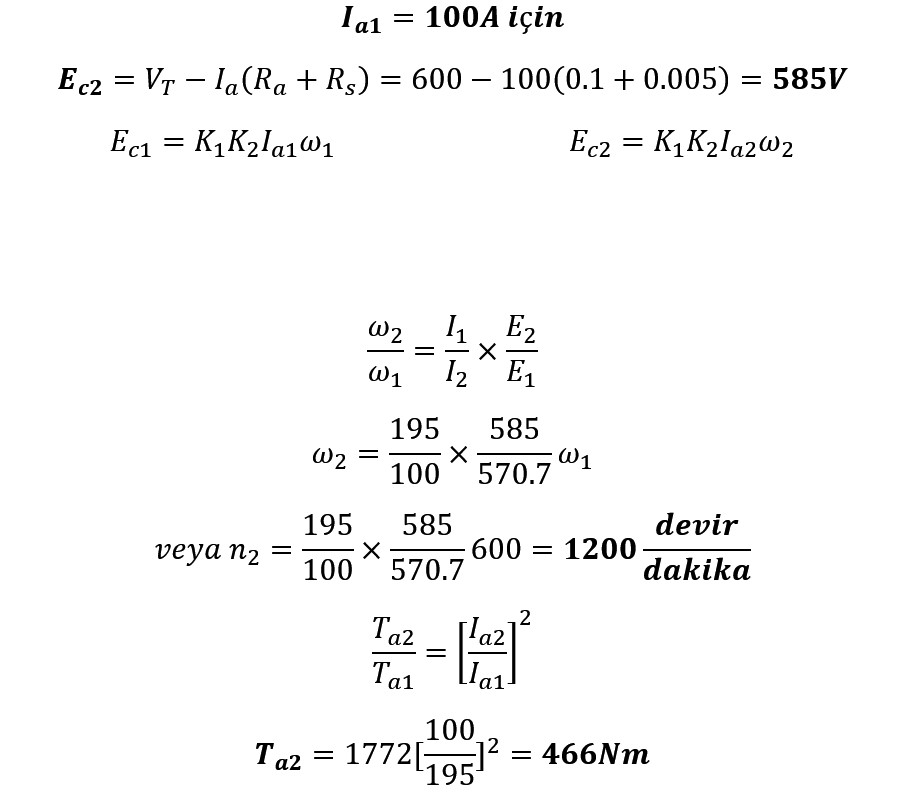
c) Yük değiştirilerek hat akımı 100A yapılırsa oluşacak hız ve endüvi momentini hesaplayınız.
ÇÖZÜM:
a)

b)
c)
YOLALMA (BAŞLAMA) AKIMI
Motor dururken, motor devir sayısınınve zıt emk’in sıfır olduğu açıktır. Endüvi devresine sabit kaynak geriliminin uygulanması çok yüksek akım ile sonuçlanacaktır. Ia’nın denkleminde Ec=0 iken başlama akımı;
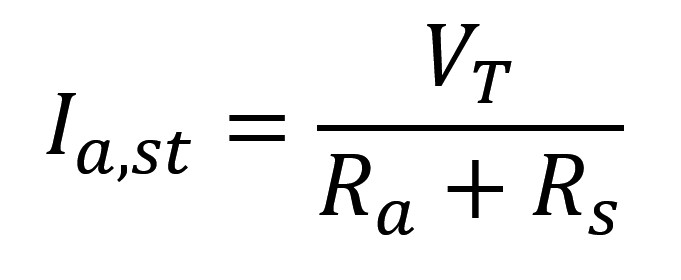
Olur. Başlama akımını sınırlamak için iki tedbir alınabilir. Birincisi ve en gerçekçi olanı motora ayarlı DA gerilim kaynağından azaltılmış gerilim uygulamaktır.
İkincisi ve klasik olanı ise akım değerini kabul edilebilir sınırda tutacak yolverme (starting) direnci (Rst) kullanmaktır. Bu direnç ayarlı olup motor devir sayısı arttıkça devreden çıkarılarak sıfır yapılır. Motor, yol aldıktan sonra eğer motor direnci devrede bırakılırsa düşük devir (performans) ile çalışacaktır.
Seri motor yüksek yolalma karakteristiğine sahiptir. Motorun yolalma, yolverme, başlama, start akımı birbirinin aynısı terimlerdir. İsim değişiklikleri sizi aldatmasın.
ÖRNEK SORU:
Bir önceki örnekteki DC seri motor yolalma akımını anma değerinin %150 oranında sınırlamak için gerekli Rst direncini hesaplayınız.
Eğer yolverme direnci devrede bırakılırsa endüvi akımı 195A olan anma değerine düşer. Endüvi zıt emk’i ve motor devir sayısını bulunuz.
ÇÖZÜM:
Başlangıçta Ec=0 iken;
Önceki örnekten Ia=195A için Ta=1772Nm 292.5A yolalma akımı için yolalma momenti;

Yolverme direnci devrede bırakılırsa;
Anma yükünde ve geriliminde n1=600d/d hız ile dönen motorun yol verme direnci devreden çıkarılamaz ise devir sayısı n2=212.6d/d’ ya düşmektedir.