"Kim iyi bir çığır açarsa, bununla amel edenlerin ecri kadar ecri bu çığırı açan alır. Kötü bir çığır açan da, bununla amel edenlerin günahı kadar günahı yüklenir.” (Müslim, “İlim”, 15, “Zekât”, 69; Nesâî, “Zekât”, 64; Tirmizî, “ İlim”,15)
Eplan Propanel programında pano tasarımı oluştururken farklı boyutlarda kablo kanallarının eklenmediğini sadece Rittal kablo kanalından 3 adet ekli bulunduğunu gördüm.
Yaptığım araştırma neticesinde de Phoenix Contact ve Rittal gibi çeşitli kablo kanalı üreticilerinin .edz formatında ürünlerinin olmadığını gördüm ve farklı boyutlarda kablo kanallarını program üzerinde kendim oluşturdum ve bu ürünleri .edz ürün formatına getirdim. Aşağıda ilgili ürünlerin içerisinde bulunduğu dosyayı görebilirsiniz.
PLC (Programmable Logic Controller), kelime anlamı itibariyle ‘programlanabilir mantık denetleyicisi’ olarak ifade edilir. Ulaşım, kimya, havalandırma, tekstil ve paketleme sistemlerinde makine hatlarının imalatında kullanılır. PLC sistemlerinde, daha az kablo kullanılır ve hata bulması daha kolaydır.
PLC sisteminde güç ve kumanda devresi olarak iki farklı kontrol birimi bulunur. Güç devresinde motorların ve sistem şebeke geriliminin (380V) kontrolü ve enerjilendirmesi gerçekleştirilir. Kumanda devresinde, güç kaynağı tarafından dönüştürülen DC gerilimle (24V) panonun röle ve kontaktörlerinin ve PLC’nin enerjilendirmesi gerçekleştirilir.
Bir makinenin imalatında sırasıyla ilk olarak sistemin enerjilendirmesi yapılır. Burada endüstride kullanılan 380 Volt AC gerilim pano içerisine bara yardımıyla dağıtılarak sigortalar, motor koruma şalteri, trafo ve 24 V DC gerilim için güç besleme cihazı enerjilendirilir.
Bir otomasyon panosu içerisinde birçok malzeme bulunur bunlar; sigortalar, kontaktörler, motor koruma şalteri, motor sürücüleri vb. olarak isimlendirilir. Şimdi isterseniz bu malzemeleri tanıyalım.
DAĞITICI ÜNİTE (BARA)
Bir otomasyon panosundaki baranın kullanımını anlamamız için ilk olarak sanayi şebeke geriliminin yapısını anlamalıyız. 380 V AC gerilim 3 faz ve bir nötrden oluşur. Bu fazlar ülkelerin veya uluslararası standart enstitülerinin belirlediği isimlendirmelere göre R-S-T-N veya L1-L2-L3-N olarak isimlendirilir. Evlerimizde kullandığımız gerilim ise tek fazlı (L-N) olup, 220V (AC) seviyesindedir. Dağıtıcı ünite içerisinde bakırdan imal edilmiş şeritler yardımıyla her bir şerit bir faz olacak şekilde fazların kablolar yardımıyla pano içerisinde dağıtımı yapılır. Dağıtmak istediğimiz fazlara göre de ayrı baralar bulunmaktadır. Bunun yanında panoların alt bölümlerinde topraklama işlemi için de kullandığımız toprak barası olarak adlandırılan çeşitleri de mevcuttur.
GWEST DAĞITICI ÜNİTE 4 KUTUPLU VE BİR FAZDAN 15 ADET DAĞITIM YAPABİLİYORUZ. MAKSİMUM GÜÇ DAĞITIM KAPASİTESİ 125A’DİR.
OTOMATİK SİGORTALAR
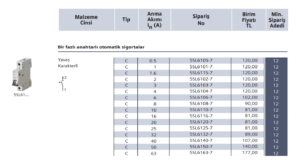
Elektrik tesisatlarında koruma elemanı olarak kullanılan otomatik sigortalar, elektrik devrelerini ve bu devrelerdeki cihazları termik ve manyetik olarak aşırı akıma karşı korur. Otomatik sigortalar B Tipi ve C Tipi olmak üzere iki gruba ayrılır. B tipi sigortalar evlerimizde bulunan prizlere bağladığımız cihazlarımızın korunması ve aşırı akım anında süratle devreyi kesmesi için kullanılır. C tipi sigortalar ise endüstride ve otomasyon sistemlerinde motor ve motor sürücülerinin korunması için kullanılır. C tipi sigortalar B tipinden farklı olarak motorlar kalkış anında yüksek akım çekeceğinden dolayı geç kapanırlar. Biz C tipi sigortaları inceleyeceğiz. C tipi sigortaların kategorizasyonunda 2 önemli parametre vardır. Bunlardan birincisi anma akımı In (A) ikincisi ise faz sayısıdır.
Siemens 5SL serisi anahtarlı otomatik sigortaları Siemens şalt ve entelasyon listesinin (Şubat 2022) gözlemleyebiliriz.
SIEMENS C TİPİ 1 FAZLI OTOMATİK SİGORTALAR
Bir fazlı anahtarlı otomatik sigortaların anma akımı değerlerine göre tasnif edildiğini görüyoruz. Seri numarası da zaten bu şekilde yapılmış. Örneğin SL6106-7 sipariş numarasına sahip otomatik sigortanın 1 faz 6 A değerinde olduğunu anlayabiliriz. Bu otomatın üzerine tıkladığımızda ise ürünün 2D ölçülerini ve EPLAN cihaz makrosuna ulaşabiliriz. .edz formatına sahip cihazı EPLAN ürün listenize ekleyip elektrik projelerinizde kullanabilirsiniz.
AÇMA KAPAMA PAKO ŞALTER (0-1)
Dağıtıcı ünite ve kaçak akım sigortasında önce güç devresini anahtarlamaya yarayan devre elemanıdır. Açma kapama pako şalterde 0 ve 1 olmak üzere iki adet konum bulunur. Pako şalterlerin anahtarlaması el ile yapılır. Aşırı akım vb. durumlarda herhangi bir değişiklik göstermezler sadece tüm güç devresinin fiziksel olarak açma ve kapaması için kullanılırlar. Pako şalterler üzerinden geçen akıma göre tasnif edilirler (25A, 40A, 63A vb.). Bunun yanında nötr bağlantısının da anahtarlandığı 4 fazlı pako şalter çeşitleri mevcuttur. Bunun yanında farklı pako şalter çeşitleri de bulunmaktadır.
KAÇAK AKIM KORUMA RÖLESİ
Pako şalterle güç devresini kapattığımızda (1 konumuna getirdiğimizde) dağıtıcı ünite üzerinden sigortalar yardımıyla panoya elektrik akışı sağlanacaktır. Kablolardaki deformasyonlar ve izolasyon hatalarından dolayı kaçak akım oluşması durumunda pano enerjilenmeye devam edeceği için ve kaçak akım noktası da tespit edilemeyeceğinden fiziksel temas durumunda yaralanma ve ölümlere yol açabilir. Kaçak akım koruma rölesi kaçak akım oluşması durumunda devreyi açarak enerjilendirmeyi keser. Eğer nötrden toprağa bir bağlantı yapılmış ve bu farkedilmemişse kaçak akım koruma rölesi devrenin kapanmasına müsaade etmez. Bu durumda faz dağıtım kutuları veya pano içerisindeki dağıtım klemenslerindeki nötr ve toprak bağlantıları kontrol edilmelidir. Ayrıca mutlaka motorların, panonun kendisinin ve pano içerisindeki güç kaynağı ve motor sürücüsü gibi cihazların toprak bağlantısı yapılmalı eğer topraklama yapılmamışsa fiziksel temastan kaçınılmalıdır.
Kaçak akım rölelerinin endüstriyel kullanımda yüksek hassasiyet (6,10,30mA) ve orta hassasiyet (100, 300, 500mA) olarak iki ayrı seviyede koruma yaptığını söyleyebiliriz.
MOTOR KORUMA ŞALTERİ
Motor koruma şalteri yada kısaca mkş motor yol verme uygulamalarında motorları aşırı akım çekme durumuna karşı koruyan devre elemanıdır. Çalışma prensibi otomatik sigortaların aynısı olmakla beraber içerisindeki çalışma akımının ayarlanması özelliğiyle otomatik sigortalardan ayrılır. Buradaki çalışma akımını motor gücüne göre seçiyoruz.
Halihazırda farklı motor güçlerine göre mkşler bulunmaktadır. Örneğin 4kW’lık bir motora 7-10 A aralığındaki bir mkş seçilerek koruma yapılabilir. Motor koruma şalterlerine modüler olarak yardımcı kontaklar bağlanabilir. Bu kontaklar bizlere mkşnin konumu hakkında bilgi verir. Örneğin motor aşırı akım çekti ve mkş açıldı. Bu durumda normalde kapalı kontağına bağladığımız 1 bitlik Input değeri bizlere çıkış vermeye başlar. Bu durumu da operatör paneli üzerine yansıtırsak o motorun arızalandığı kanısına varabiliriz.
SIEMENS MOTOR KORUMA ŞALTERLERİ
KONTAKTÖR
Yüksek güçlerde kullanılan elektromanyetik anahtarlama elemanlarına kontaktör adı verilir. Kontaktörler anahtarlama yoluyla açma-kapama yaparak elektrik enerjisini bir noktadan diğerine taşırlar. Kontaktörler aşırı akım durumunda koruma yapmazlar bu yüzden devrelerde mutlaka otomatik sigorta, motor koruma şalteri veya termik röle gibi koruma yapan devre elemanlarıyla birlikte kullanılmalıdır.
Kontaktörler; (A1-A2) bobin uçları enerjilendirilerek anahtarlama yaparlar. Bobin uçlarına enerji verildiğinde kapalı kontaklar açılır, açık kontaklar kapanır.Bobin uçlarının besleme gerilimi farklı kontaktörlere göre değişiklik arzedebilir. Kontaktörlerin üzerinde kendilliğinden gelen bir adet NO veya NC yardımcı kontağı bulunur. Bu kontaklar genelde mühürleme veya start-stop uygulamalarında kullanılır Tabi çok farklı kullanımlar için farklı kontaktör çeşitleri mevcuttur.
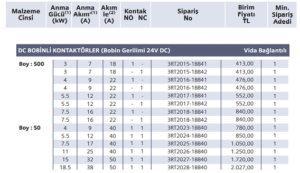
SİEMENS 24V DC BOBİNLİ KONTAKTÖRLER
Yukarıda görüldüğü gibi kullanacağımız cihazın gücüne bakarak anma gücü veya anma akımına göre kontaktörümüzü seçebiliriz. Kullanacağımız yardımcı kontağın açık veya kapalı olma tercihini yapabiliyoruz. Yine modüler olarak yardımcı kontaklar eklememiz de mümkün.
SLİM RÖLE
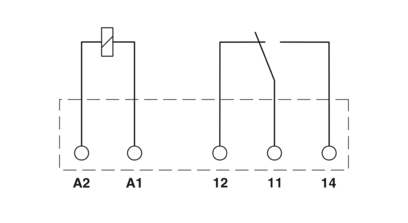
Slim röleler; selenoid valflerin, tepe lambasının veya buton ışıklarının enerjilendirmesinde, CPU’nun korunmasında veya sinyal seviyesinin yükseltilmesinde kullanılırlar. Piyasada modüler olarak satılırlar.
A1 bobini çektirilerek kontakları aç kapa yaptırılır. Yukarıdaki röleyi incelersek 11 numaralı ucun ortak uç olduğunu 12 numaranın normalde kapalı kontak, 14 numaranın ise normalde açık kontak olduğunu görüyoruz.
FAZ KORUMA RÖLESİ
Üç fazlı (380V) sistemlerde faz sırasının doğru çalışması ve fazlar arası dengesizliğin giderilmesi için faz koruma rölesi kullanılır.
Örneğin; kılavuz çekme makinasının fabrika içerisinde bir noktadan farklı bir noktaya taşındığını düşünün. Burada fişi farklı bir kombinasyon kutusundaki prize bağlamamız gerekli. Bu kutuda faz sıralamaları farklıysa veya fazla arası dengesizlik varsa bu durum motorların veya pano içerisindeki cihazların çalışmasına zarar verebilir.
SIEMENS SIRIUS 3UG4512-1AR20
Gerilim dengesizliği durumunda L1-L2 faz arası gerilim 400V iken L2-L3 faz arası gerilim 320V kabul edilebilir sınırların altında olabilir. Bu durumda faz sıralamalı koruma rölesi hata verir ve cihazların korunması sağlanmış olur.
Faz koruma rölelerini otomasyon panosu içerisinde kullanırken her bir faz için 2 veya 3 Amper otomatik sigorta kullanılabilir.
GÜÇ KAYNAĞI (AC/DC DÖNÜŞTÜRÜCÜ)
Otomasyon panosu içerisinde sürücülerden arıza bilgisi alabilmek için röle çıkışlarını, CPU, Operatör Paneli ve Ethernet Switch gibi 24V (DC) gerilim isteyen cihazların çalışmasını sağlamak için Güç Kaynağı kullanılır.
Yukarıda Weidmüller marka bir güç kaynağı görmektesiniz. Cihazın 220V besleme gerilimi bulunmakta. Çıkış olarak ise 1 adet açık kontak, 2 ayrı 24 DC gerilim çıkışının olduğunu görüyoruz.
TRAFO (AC/AC DÖNÜŞTÜRÜCÜ)
Otomasyon panosu içerisinde bazı durumlarda besleme gerilimi 12-24-30-36 V (AC) seviyelerinde olan cihazlar olabiliyor. Bunlar için trafo kullanılır. Trafoların güç kaynağından farkı AC gerilimin frekansını değiştirmeden AC gerilimin değerini değiştirir. Güç kaynağında DC gerilim istediğimiz için tam dalga doğrultucu kondansatör ve voltaj regülatörü kullanılır kullanılır.
TERMOSTAT, FAN VE FİLTRE
Pano içerisindeki malzemeler çalışma ortamındaki sıcaklık, nem ve toz gibi istenmeyen ortamlarda bulunabilirler. Pano içerisindeki tüm malzemeler belirli bir ortam sıcaklığı içerisindeki çalışma aralığında maksimum performanslarını verebilirler. Sıcaklığın istenilenden fazla olduğu durumda ortam sıcaklığını sürekli olarak ölçen termostat sıcaklık değeri aşıldığında istenilen sıcaklığa düşüne kadar fanı çalıştırır.
PLASTİM TERMOSTAT
QUİCK FANLI FİLTRE
MOTOR SÜRÜCÜSÜ/INVERTER
İçerisinde hassas kontrol etmemiz gereken motorlar bulunan bir makine varsa bu motorları motor sürücüler kullanarak kontrol ediyoruz. Pozisyonlama, hız, fren zamanı, kalkış rampası gibi birçok ayarı motor sürücüsü üzerinden yapabiliriz. 1 motor sürücüsüyle birden fazla motoru kontrol edebiliriz. Motor sürücülerinin besleme bağlantıları farklılık oluşturabilir yani 220V (AC) veya 380V (AC) besleme gerilimi bulunan motorlar mevcuttur.
Motor sürücüsü seçiminde temel olarak kullanacağımız motorun gücünü dikkate alırız. 1.5 kW lık motor için yine 1.5 kW’lık bir motor sürücüsü kullanılabilir ancak asansör uygulamaları veya yüksek ağırlıkta malzeme taşıyan konveyör uygulamalarında biraz daha yüksek güçlü motor sürücüsü seçilebilir çünkü motor sürücüsü yüksek moment durumunda zorlanabilir.
Yine hassas kontrol gereken asansör uygulamaları gibi durumlarda frenleme direnci kullanılmalıdır.
Motor sürücüsü bağlantıları yapıldıktan sonra devreye alma işlemi gerçekleştirilir. Motor sürücüsünü devreye almaktan kasıt temel parametreleri ayarlamak ve motor etiketindeki değerleri sürücüye girmektir. Bir motor sürücüsünde 2000’e yakın parametre bulunur. Motor plaka değerleri girildikten sonra kalkış rampası zamanı, duruş rampası zamanı, kontrol modu ve Avrupa (50Hz)/Amerika (60Hz) frekans değerleri kontrol edilip ayarlanması gereken önemli parametrelerdir.
PLC ve otomasyon işleriniz (devreye alma, revizyon, EPLAN proje çizimi vb.) için nurullahbesli@hotmail.com mail adresinden iletişime geçebilirsiniz.
2005 yılında Kayseri Erciyes Üniversitesi Öğretim Üyesi Derviş KARABOĞA tarafından nümerik optimizasyon problemlerinin çözümü için geliştirilmiş olup bu problemlerde çok başarılıdır. Yapay arı koloni algoritması optimizasyon algoritmasının arama uzayının farklı alanlarına yayılabilir. Keşif yeteneği, sömürü yeteneğine göre daha başarılıdır.
Bu algoritma doğada arıların bal yapmak için kullandığı yöntemi temele alır. Biz bir kovan içerisindeki arıları kâşif arılar, işçi arılar ve gözcü arılar olarak 3’e ayırıyoruz. Kâşif arılar, kovandan çıkıp rastgele besin kaynağını ararlar. İşçi arılar kâşif arıların bulduğu besin kaynağına gider, eğer bundan daha iyi bir besin kaynağı bulurlarsa ona yönelirler. Gözcü arılar ise kovanda işçi arıların yaptığı titreşimi takip ederek en iyi besin kaynağına yönelirler. Bu arılar besin kaynakları arasından hangisine gideceğine kendisi karar verir.
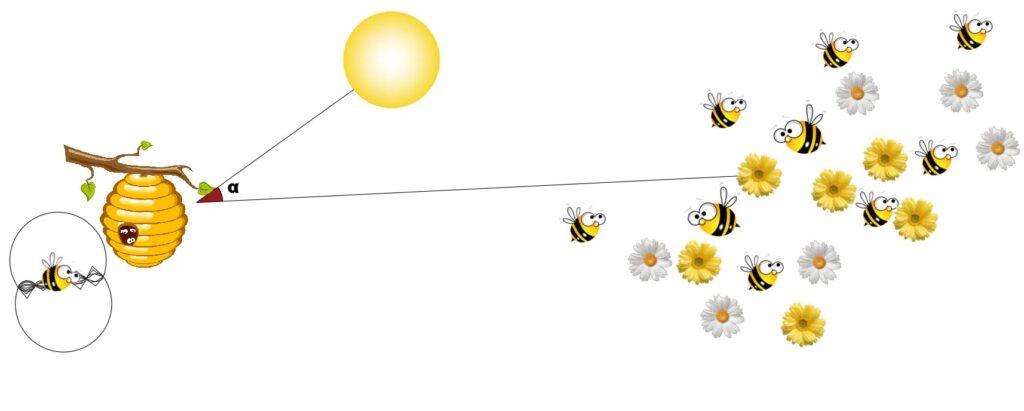
Kâşif arı rastgele bir şekilde çiçeklerden besin aramaya çıkar. Çiçeklerin üzerindeki besinleri ise kalitesine göre değerlendirir. Eğer besin kaynağı uygunsa kovana geri döner ve yaptığı titreşim hareketleriyle işçi arılara besin kaynağının konumunu tarif ederler. Burada arıların kullanmış oldukları hayretengiz bir yöntem vardır.
Kâşif arılar güneşten gelen açı ile besin kaynağı arasında açı oluşturacak şekilde titreşim dansı yaparlar. Ne kadar fazla titreşim yaparlarsa besin kaynağı o kadar yakın, ne kadar az titreşim yaparlarsa besin kaynağı o kadar uzaktır. Bu titreşim haberleşmesini 1973 yılında Karl von Frisch tespit etmiştir.
Kovan etrafındaki her bir besin kaynağı muhtemel çözümü ifade eder. Bulunan en iyi besin kaynağı en iyi çözüm demektir. Besin kaynağı tükendiğinde ise işçi ve gözcü arılar kâşif arı gibi hareket ederler.
Başarısızlık sayacında limite ulaşan çözümler silinir ve yerine kâşif arılarca rastgele çözüm türetilir.
En başarılı çözüm kaydedilir.
UNTIL
Sonuç= En başarılı çözüme ulaşılır.
Yapay arı koloni algoritmasını popüler kılan uygulama kolaylığı ve parametre sayısının azlığıdır.
Şimdi bu algoritmayı gezgin satıcı problemi üzerinde deneyelim.
ÖRNEK SORU:
A,B,C,D ve E şehirleri arasındaki mesafeler aşağıdaki mesafe matrisinde verilmiştir. Buna göre yapay arı koloni algoritmasını kullanarak en kısa çözüme ulaşmaya çalışınız. (Besin kaynağı=5 limit=3)
A
B
C
D
E
A
20
10
5
8
B
20
12
17
13
C
10
12
7
10
D
5
17
7
10
E
8
13
10
10
MESAFE MATRİSİ
ÇÖZÜM:
İlk olarak buradaki mesafe matrisinden yararlanarak başlangıç verisi olması için rastgele 5 adet çözüm üretiyoruz. Ürettiğimiz her bir çözüm kaynak sayısına denk gelmektedir. Yani elimizde 5 adet kaynak bulunuyor.
D-B-E-A-C-D=55
B-C-D-E-A-B=57
E-D-A-C-B-E=50
E-B-A-D-C-E=55
A-E-B-D-C-A=55
Rastgele üretilen çözümler arasında en kaliteli çözüm kaynağı 3. besin kaynağıdır. Yukarıdaki bölüm kaşif arı safhasına girmektedir.
Daha sonra eğer ben bu çözümlerden yeni bir çözüm oluşturmak istiyorsam işçi arı safhasına geçip komşu çözümler oluşturmalıyım.
1. işçi arının 1. ve 3. besin kaynağına gidip 1. ve 3. çözüm kaynaklarını kullanarak yeni bir çözüm ürettiğini varsayalım.
D-B-E-A-C-D=55
E-D-A-C-B-E=50
İki noktalı çaprazlama yöntemi kullanarak 3. ve 5. nodlardan keserek üretilen yeni çözüm ve maliyeti aşağıdaki gibidir.
D-B-A-C-E-D=67
Yöneldiğimiz çözüm 1’di ve bu çözümün maliyeti 55’ti. Arı yeni çözüm üretti ve yeni çözüm daha kötü durumda. 1. çözümün başarısızlık sayacını 1 arttırırız. Başarısızlık sayacı (1)=1 oldu. Bunun yanında mesela 2. işçi arı, maliyeti 57 olan 2. besin kaynağına gitti. Yeni çözüm üretti ve ürettiği çözümün maliyeti 56 oldu. O zaman sonucu 57 olan çözümü iptal edip, 56 olan çözümü tercih eder. 2. çözümün başarısızlık sayacı 0 olur, yani başarısızlık sayacı sıfırlanır.
başarısızlık sayacı (1)=1 –> daha iyi çözüm bulamadı
başarısızlık sayacı (2)=0 –> daha iyi çözüm bulundu, eski çözüm silindi.
başarısızlık sayacı (3)=0 –> daha iyi çözüm bulundu, eski çözüm silindi.
başarısızlık sayacı (4)=1 –> daha iyi çözüm bulamadı
başarısızlık sayacı (5)=1 –> daha iyi çözüm bulamadı
Başarısızlık sayacı limite ulaşırsa, işçi arı kaşif arı gibi davranıp rassal çözümler türetir.
Bu aşamadan sonra gözcü arı safhasına geçilir. Gözcü arılar rulet tekerleği yöntemini kullanarak seçim yaparlar. Bu, gözcü arıların daha başarılı çözümü seçme ihtimalini arttırır.
Yapay arı koloni algoritmasında 2 adet parametre vardır. Bunlar, limit ve besin kaynağı parametresi olarak isimlendirilir.
xmi=li+rand(0,1).(ui-li)
x : çözüm matrisi
rakamlar : bu çözüm matrisi içerisindeki …nci eleman.
li : lower bound-alt sınır
ui : upper bound-üst sınır
İşçi arı safhası
vmi=xmi+∅mi(xmi-xki)
∅mi :-1 ile 1 aralığında rastgele bir sayı
xki : rastgele başka bir çözüm seçiyor
gözcü arı safhası
Mevcut çözümleri rulet tekerleğine yerleştiriyor. Hangi çözüme gideceğini kendisi seçiyor.
ÖRNEK SORU
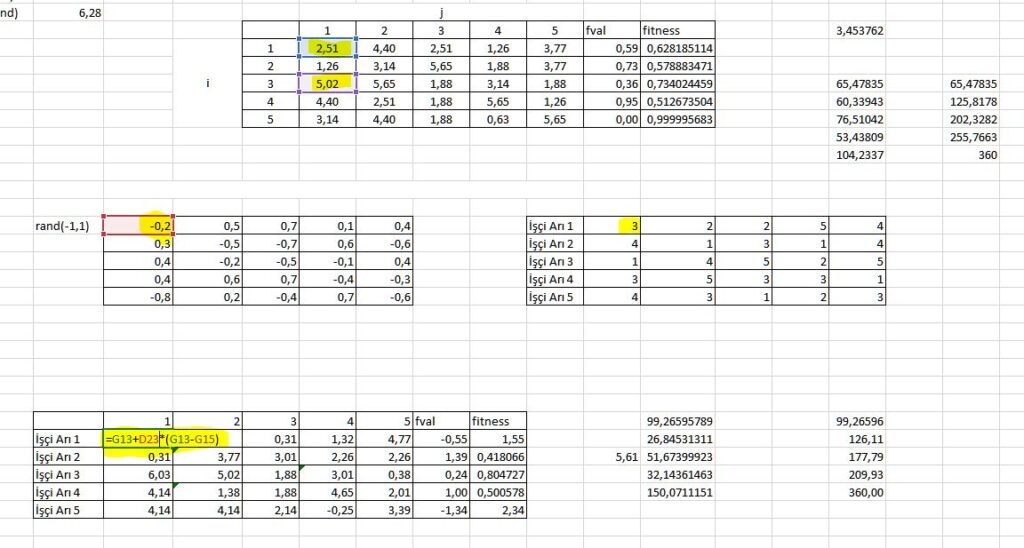
Yapay arı koloni algoritmasıyla ilgili üniversite final sınavımda çıkan bir soruyu ve bu sorunun Excel üzerinden çözümünü yapacağım.
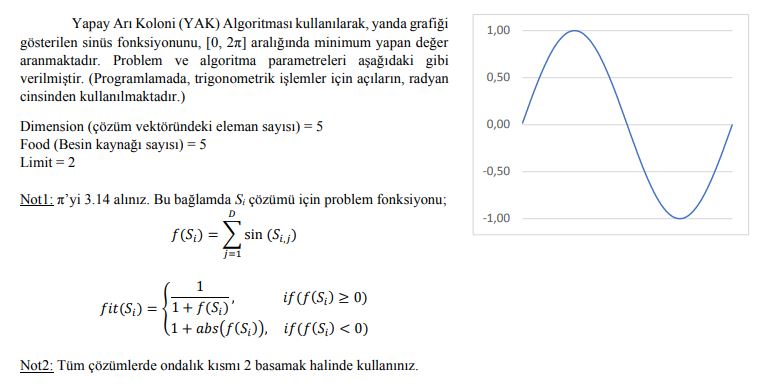
Burada sinüs fonksiyonunun değer aralığını radyan cinsinden yazmalıyız.( π =3,14)
[0-2π]=[0-6,28]
0=>lower bound
6,28=>upper bound
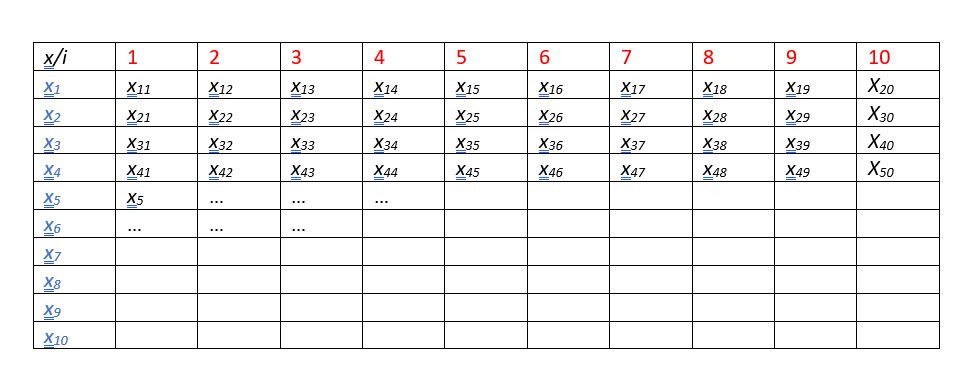
D=5 değerinde olması her bir çözümde 5 adet değer olduğu anlamına geliyor. Ayrıca 5 adet besin kaynağı olması ise 5 adet çözümümüzün olması gerektiğini ifade ediyor. Sonuç olarak elimizde 5*5 boyutunda bir matris olacak.
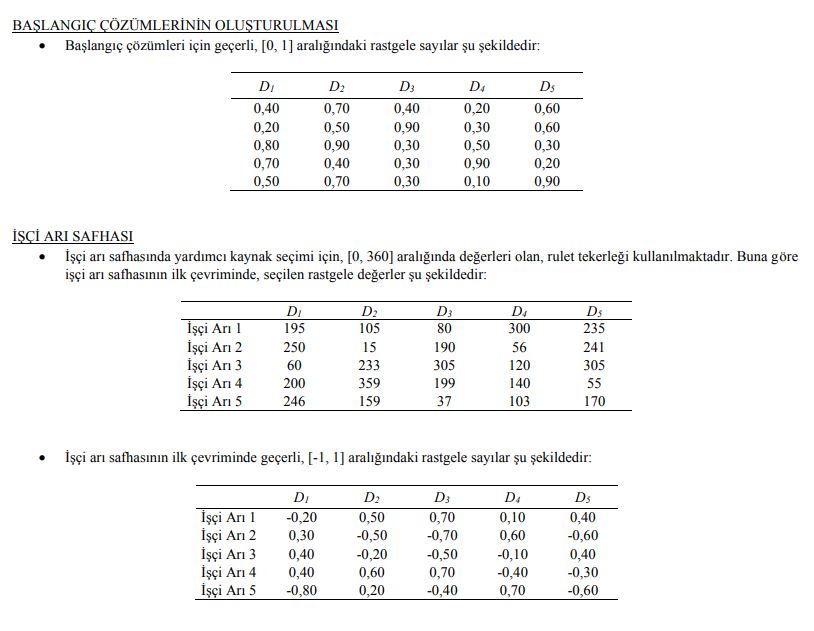
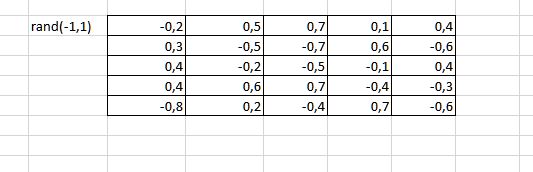
Yukarıda BAŞLANGIÇ ÇÖZÜMLERİNİN OLUŞTURULMASI bölümünde Başlangıç çözümleri için geçerli, [0,1] aralığındaki rastgele sayılar olarak ifade edilen xmi=li+rand(0,1).(ui-li) formülündeki rand(0,1) bölümüdür. Buradaki rastgele sayılar her öğrenciye göre değişiklik arzedebileceği için hocamız belirli sayılardan oluşan matris oluşturdu.
Bu matrisi kullanarak çözüm matrisini oluşturacağız.
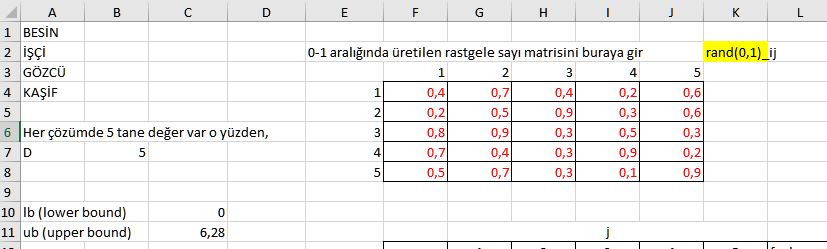
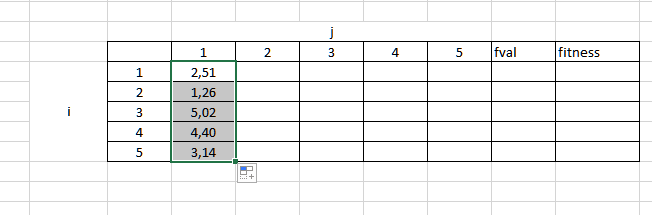
Bize soruda verilen rastgele sayı matrisini (rand(0,1)), lower ve upper bound sayılarını ve oluşturacağımız 5*5’lik çözüm matrisindeki tüm xmi değerlerini de; bu sayılar ve matristeki kutucuklardan alıp tamamlayacak şekilde Excel’e geçirelim.
İlk olarak 0-1 arasındaki rastgele sayı matrisini ve lb ve ub değerlerini [lb=C10, ub=C11]aşağıdaki gibi yerleştirelim.
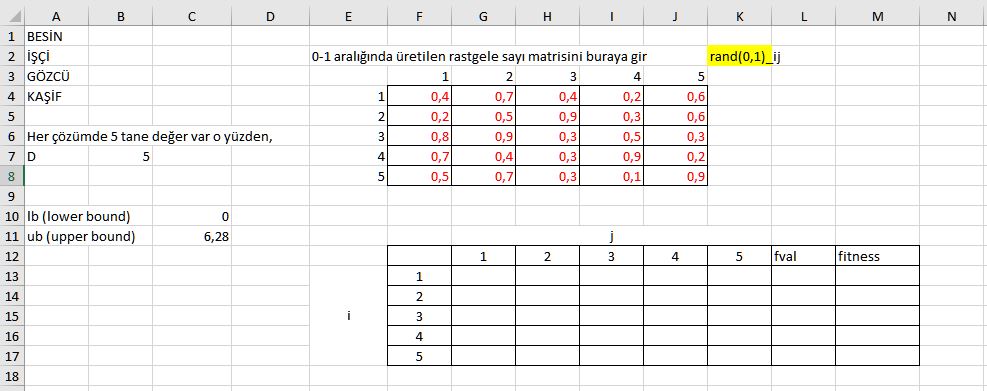
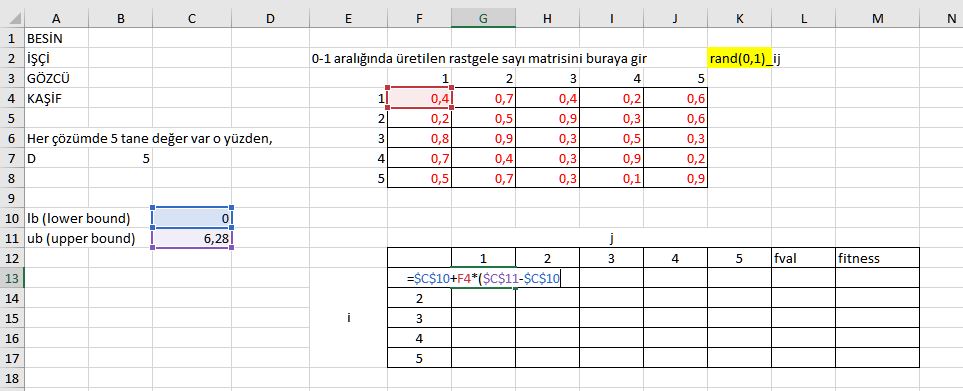
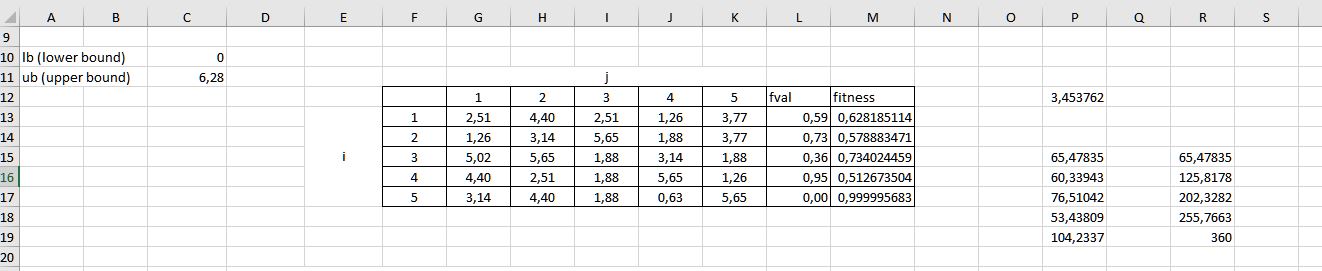
Şimdi xmi=li+rand(0,1).(ui-li) formülüyle başlangıç çözüm matrisini oluşturacağız.
Başlangıç çözüm matrisindeki x11sayısını bulabilmemiz için l1 sayısını C10 kutucuğundan, ui sayısını C11 kutucuğundan ve rastgele sayı matrisinin rand(0,1)11=(0,4) sayısını F4 kutucuğunun içerisinden seçmemiz gerekli. Formüldeki değer aralığı tüm matris için geçerli olacağı için bu sayıları sabitleyebiliriz. x11 deki kutucuğu seçip yatay ve dikey olarak kaydırma işlemi yapıp formülü tüm matris içerisinde uygulanabilir kılmak için bu işlem gerekli.
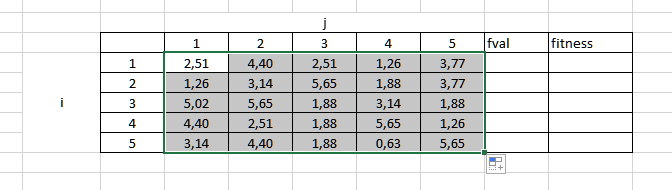
Sonucu G13 kutucuğuna kaydedecektir. Bu kutucuğun sağ alt tarafından tutup aşağıya ve sağa doğru kaydırdığımızda rand(0,1)ij matrisini sabitlemediğimiz için bu matristeki sayılarla eşlenik bir şekilde hesaplama yapacak ve tüm matris içerisindeki sayıların hesaplanmış hali hazır olarak karşımıza çıkacak.
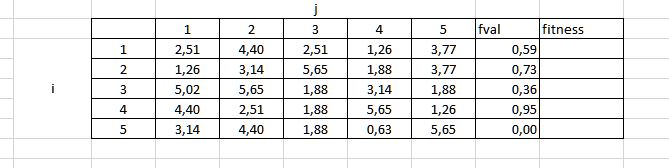
Daha sonra yukarıdaki matriste fval olarak ifade ettiğim fonksiyonu her bir çözüm için hesaplamamız gerekli. Bunun için exceldeki sin() fonksiyonunu kullanmam gerekli. =sin()+sin()… şeklinde 5 tane değeri girip aşağıya doğru kaydırarak sonuca tüm çözümler için ulaşıyorum.
Problem fonksiyonunun altında uygunluk değerini hesaplamamız için verilen değer aralığı mevcut. Hesapladığımız fonksiyon (fval) değeri 0’a eşit veya 0’dan büyükse [1/(1+fval)], 0’dan küçükse [1+|fval|] şeklinde uygunluk değerini bulmamız gerekli.
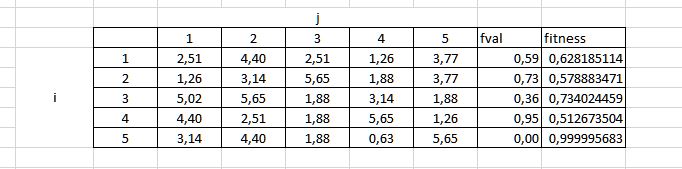
Fonksiyonun hepsinin 0’dan büyük olduğunu görüyorum. Bu yüzden [1/(1+fval)] işlemini gerçekleştirmem gerekli.
Fonksiyonun BAŞLANGIÇ ÇÖZÜMLERİNİ uygun bir şekilde oluşturduk ve Yapay Arı Koloni Algoritması’nın İşçi Arı Safhâsı’nı gerçekleştirmeye uygun bir şekilde hazırladık.
vmi=xmi+∅mi(xmi-xki)
Problemde İşçi Arı Safhâsı’yla ilgili olarak bizlere rulet tekerleğinin kullanılacağını ifade etmiş ve işçi arı safhasının ilk çevriminde seçilen rastgele açı değerlerini ve rand(-1,1)=>∅mi [-1,1] aralığında üretilen rastgele sayıları bize tablo şeklinde sunmuş.
Rastgele sayı tablosunu Excel’e ekledik.
Şimdi bizlere verilen açı değerlerini kullanabilmek için rulet tekerleğine ihtiyacınız var. Rulet tekerleği yöntemini BAŞLANGIÇ ÇÖZÜMLERİ içerisindeki uygunluk (fitness) değerlerini kullanarak elde edeceğiz. 5 adet çözümün uygunluk değerlerini topla() fonksiyonuyla alalım. Daha sonra her bir çözümü toplama bölüp 360 ile çarparak rulet tekerleği içerisinde hangi açı değerine karşılık geldiğini hesaplayalım.
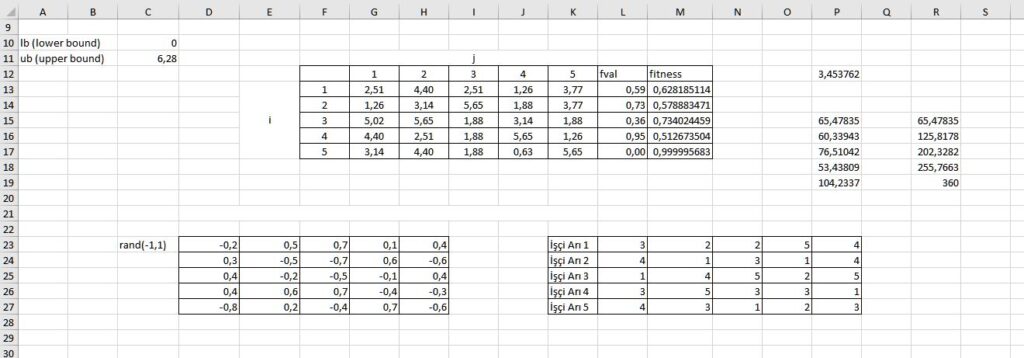
Daha sonra verilen açı değerlerinin olduğu tabloyu Excel’e yerleştirelim. Buradaki rastgele açı tablosunu yerleştirirken rulet tekerleğinde hesapladığımız açılardan kontrolünü sağlayıp kaçıncı çözüme denk geliyorsa o çözümü yazmamız hesaplama kolaylığı açısından bizim için daha uygundur.
Örneğin; “İşçi Arı 1″in D2‘de rulet tekerleği üzerinde rastgele bir şekilde 105 sayısına denk geldiğini görüyoruz. Bu sayıyı oluşturduğumuz rulet tekerleği üzerinde kontrol ettiğimizde aynı dimension üzerindeki 2. çözüme denk geldiğini görüyoruz. Bu yüzden üreteceğimiz yeni çözümdeki rastgele sayı değerini (xki) 2. çözüm olarak almamız gerekli. Tablodaki açıların da bu şekilde rulet tekerleği üzerinden kontrolünü gerçekleştirip aynı dimension üzerindeki kaçıncı çözüme gideceğimizi bu şekilde bulmalı ve yeni tabloyu Excel üzerinde oluşturmalıyız.
Artık yeni çözüm matrisini oluşturmamız için gerekli veriler elimizde bulunuyor.
Yeni çözüm matrisi için aşağıdaki gibi bir tablo oluşturuyorum.
İşçi Arı 1’in 1. dimension’da ürettiği çözüm 2,51. Bu arı aynı dimension içerisinde rastgele 3. kaynağa gittiğini görüyorum. Bu kaynağın sayı değeri 5,02. Burada üretilen -1 ile 1 sayısı rastgele sayı -0,2. Bu durumda uygulayacağımız işlem “=2,51+-0,2(2,51-5,02)”. bu sayıların bulunduğu kutucukları işaretleyerek sonuca ulaşabiliriz. Farklı bir fonksiyon kullanılarak da bu işlem yapılabilir ancak hangi kaynağa gittiğine matristen bakıp bunları tabloya işlemek daha kısa sürüyor.
Tabloda oluşan çözümlerin fval değerini hesaplamalı daha sonra bu fval değerlerini kontrol ederek uygunluk fonksiyonunu oluşturmamız gerekli. Burada İşçi Arı 1’in fval değerinin -0,55 olduğu için uygunluk fonksiyonu 1+abs(-0,55) şeklinde olmalı.
Excelde 1+MUTLAK(-0,55) veya 1+MUTLAK(I35) şeklinde yazmalıyız.
Tüm çözümler için uygunluk fonksiyonu oluştuğuna göre rulet tekerleğini yukarıda görüldüğü gibi oluşturabiliriz.
2 adet çözüm matrisi oluşmuş oldu. Bunlardan birisi BAŞLANGIÇ ÇÖZÜM MATRİSİ ikincisi İŞÇİ ARI SAFHASININ İLK ÇÖZÜMÜ MATRİSİ. Bizim bu safhanın ikinci çevriminde iki matriste üretilen çözümlerin fval değerlerini karşılaştırıp en düşük maliyetli olan hangisiyse o çözümü alıp yeni bir çözüm matrisi oluşturmamız gerekli.
Buna göre İŞÇİ ARI SAFHASININ 2. ÇEVRİMİNİN çözüm matrisi, fval değeri, uygunluk fonksiyonu ve rulet tekerleği de aşağıda görüldüğü gibi oluşur.
Yukarıdaki soruda bizden istenilen tüm aşamaları gerçekleştirip çözümlere ulaşmış olduk.
Bu yazımızda Yapay Arı Koloni Algoritması’nın ortaya çıkışı, algoritmanın yapısı ve algoritmayla ilgili kapsamlı bir örnek uygulama yapılması adımlarını sırasıyla gerçekleştirdik.
Karınca Koloni Optimizasyonu karıncaların yiyecek araştırması sırasında kullandıkları yöntemler gözlenerek oluşturulmuştur. Karıncalar besin bulmak için yuvalarından çıkarlar. Besine ulaşan karıncalar besinin kalitesi, besin ile yuva arasındaki mesafe gibi bir çok bilgiyi diğer karıncalara ulaştırırlar. Bu bilgilerin ulaştırılması biyolojik olarak feromon adı verilen hormon aracılığıyla gerçekleşir. Feromon, aynı tür üyeler arasındaki sosyal ilişkileri düzenleyen, dışarıya kokuyla yayılan hormon çeşidine verilen isimdir. Besine ulaşan karınca eğer besin kaliteliyse burada feromon salgısı oluşturur. Ardından gelen karıncaların da bu salgıyı oluşturmasıyla birlikte yuva ile besin arasındaki yolda feromon yoğunluğu oluşmaya başlar ve diğer karıncalar da bu yoğunluğa yönelirler. Feromon hormonu, yuva ile besin arasındaki en kısa mesafenin oluşturulmasında da kullanılır.(bkz.2)
1989 yılında düzenlenen iki deneyden birinde karıncaların yuva ile besin arasındaki iki eşit mesafeden birini tercih etmesi gözlendi. Karıncalar rastgele bir şekilde iki ayrı yolda da yoğunlaşmıştı. Diğer deneyde ise biri diğerinden iki kat uzun iki ayrı yoldan birini tercih etmesi gözlenen karıncaların kısa yolda yoğunlaştığı gözlemlendi.(bkz. 1)
Karınca koloni optimizasyonu 3 ayrı algoritmadan oluşur.
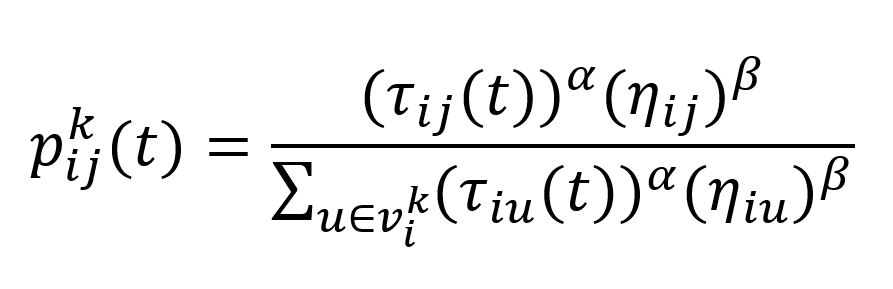
Karınca Sistemi (Ant System) Algoritmasının Gezgin Satıcı (Traveling Salesman) Problemi üzerinde uygulanması için geliştirilmiş formüller bulunmaktadır.
Bir k karıncasının t iterasyonunda i noktasından j noktasına gitme olasılığı pijk(t) olarak gösterilir.
ηij=minimizasyon problemi olduğu için 1/(mesafe) τiu= yeni feromon
ηij=minimizasyon problemi olduğu için 1/(mesafe)
τiu= yeni feromon
Alfa (α) Parametresi=Düğümler arası feromonun göreceli önemini belirleyen parametre
Beta (β) Parametresi=Düğümler arası mesafenin önemini belirleyen parametre
Tau (?) Parametresi=Düğümler arasındaki feromon miktarını belirleyen feromon matrisidir. Feromon miktarı ilk başta çok düşük seviyelerde belirlenir.
Yine gezgin satıcı problem içerisinde bir örnek yapalım
A, B, C, D ve E şehirleri arasında herhangi bir şehirden aldığı malı yine aynı şehre geri dönerek tamamlayan mesafe matrisi verilmiştir. Parametre değerlerini belirleyip, başlangıç feromon matrisini oluşturun. Rastgele mesafelerden oluşan başlangıç çözümlerini oluşturun.
A
B
C
D
E
A
20
10
5
8
B
20
12
17
13
C
10
12
7
10
D
5
17
7
10
E
8
13
10
10
MESAFE MATRİSİ
Daha sonra oluşturacağımız parametre değerlerinden alfa (α) değeri genellikle 1,3 veya 5 değerlerinden herhangi bir tanesi seçiliyor.
Beta (β) değeri ise genellikle 5 olarak seçiliyor.
Ro (ρ) değeri dediğimiz feromonun uçuculuk katsayısı ise genellikle 0,1 olarak alınıyor.
Oluşturacağımız feromon matrisi 0’dan büyük ancak çok küçük değerlerde olmalı bunun için ilk olarak feromonları her bir nod için 0,1 olarak belirliyorum.(bkz. 5)
A
B
C
D
E
A
0,1
0,1
0,1
0,1
B
0,1
0,1
0,1
0,1
C
0,1
0,1
0,1
0,1
D
0,1
0,1
0,1
0,1
E
0,1
0,1
0,1
0,1
FEROMON MATRİSİ
Yukarıda bize verilen mesafe matrisini görmekteyiz. Bu matrise göre rastgele bir şekilde başlangıç çözümlerini oluşturuyorum.
A-C-E-B-D-A=55
B-E-A-D-C-B=45
C-B-A-D-E-C=57
D-A-E-C-B-D=52
E-D-B-C-A-E=57
Algoritma sırasına göre ilk olarak parametre değerlerini belirledim, daha sonra feromon matrisini oluşturdum. Son olarak ise rastgele bir şekilde başlangıç değerlerini belirledim.
Şimdi ise daha iyi çözümler oluşturup en iyi çözüme ulaşmak için algoritmanın diğer aşamalarını gerçekleştirelim.
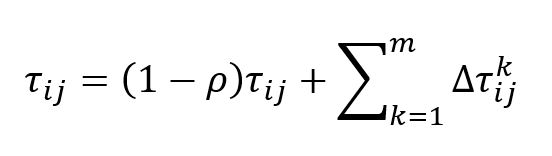
Yeni feromon değerlerini bulurken;
?ij= i nodundan j noduna gidişin feromon matrisindeki karşılığının değeri
Δ?ij= i’den j’ye giden nodlar (örneğin C-D), oluşturulan başlangıç değerleri (çözümleri) içerisinden kontrol edilir. Başlangıç çözümü içerisinde eğer bu noddan mevcutsa o çözümün 1/maliyetini dahil ediyoruz. Eğer bulunmuyorsa 0 ekliyoruz. Oluşturduğumuz başlangıç çözümlerindeki tüm nodları tek tek kontrol etmeliyiz.(bkz. 6)
Şimdi yukarıdak başlangıç çözümleri içerisinden sırasıyla tüm nodları kontrol edip bulduğumuz feromon değerlerinden yeni feromon matrisini oluşturalım.
?AB= (1-0,1)0,1=0,09 (AB nodu başlangıç çözümleri içerisindeki hiçbir çözümde bulunmuyor)
?AD= (1-0,1)0,1+[(1/45)+(1/57)]=0,13 (AD nodu 2. ve 3. başlangıç çözümleri içerisinde bulunuyor)
?AC= (1-0,1)0,1+(1/55)=0,108 (AC nodu yalnızca 1. başlangıç çözümü içerisinde bulunuyor)
Bu şekilde tüm nodları hesapladığımızda oluşan yeni feromon matrisi;
A
B
C
D
E
A
0,09
0,108
0,138
0,126
B
0,107
0,107
0,127
0,112
C
0,107
0,126
0,09
0,108
D
0,127
0,112
0,112
0,107
E
0,112
0,108
0,127
0,107
Yeni Feromon Matrisi
Yukarıdaki yeni feromon matrisine baktığımızda A ile B arası nodun karıncalar tarafından kullanılmaması sebebiyle buradaki feromon değerinin düştüğünü gözlemleyebiliriz. A ile D arasındaki feromon değerine baktığımızda ise buranın 2. ve 3. karıncalar tarafından kullanıldığını görüyoruz. Bundan dolayı A-D nodunun feromon değeri artış göstermiştir. Bir sonraki iterasyonda A-B düğümünün seçilme olasığı azalırken A-D nodunun seçilme olasılığı azalıcak.
Şimdi yukarıda öğrendiğimiz karıncanın bir düğümden başka bir düğüme gitme olasılığını hesaplayalım;
Formüle göre A’da bulunan bir karıncanın B düğümüne gitme ihtimali;
Optimizasyon tekniği, fonksiyonun minimum ve maksimum noktasını belirlemede kullanılır. Eğer problem minimizasyon problemiyse minimum değerler (maliyet) noktası bulunacak. Maksimizasyon problemlerinde ise maksimum değerler (maliyet) noktası bulunacak. Buradaki maksimum veya minimum noktaları sezgisel veya meta-sezgisel algoritmalar yoluyla buluyoruz.
Optimizasyon Teknikleri’nde, Yapay Zeka optimizasyonundan bahsedeceğiz ve karşımızdaki milyonlarca veya milyarlarca çözüm içerisinden optimum çözümü bulmaya çalışan algoritmalar kullanacağız ya da optimumu arayan teknikler üzerinde çalışacağız.
Optimizasyon problemlerini nümerik (continous) optimizasyon problemleri ve ayrık (discrete) optimizasyon problemleri olarak ikiye ayırabiliriz. Nümerik (continous) optimizasyon problemlerine minimum maksimum noktayı bulma problemleri, Ayrık (discrete) optimizasyon problemlerine ise araç rotalama problemleri ve gezgin satıcı problemlerini örnek olarak verebiliriz.
50 kg yük taşıyan bir araç çeşitli illerden geçerek kargosu olan illeri Düzce’deki toplama noktasına getirmektedir.
ÖRNEK SORU 1
Bilecik
Bolu
Düzce
Karabük
Kocaeli
İstanbul
Sakarya
Toplanma
Dağıtım
Ağırlık
Karabük
Sakarya
20
Karabük
Kocaeli
15
Bolu
İstanbul
25
Sakarya
İstanbul
20
Düzce’den yola çıkıp Bolu’dan 25 kilogram yük alan araç daha sonra Karabük’e uğrayamaz çünkü aracın maksimum taşıma kapasitesi 50 kilogramdır. Bu araç Bolu’dan sonra sadece Sakarya’ya uğrayabilir.
ÖRNEK SORU 2
Maksimum hacmi 50m3 ve maksimum taşıma ağırlığı 100 kg olan bir sırt çantasına aşağıdaki hacim ve ağırlığa sahip 6 adet cisim yerleştirilecektir. Çantanın içerisine cisimler 1, konulmayan cisimler 0 ile numaralandırılacaktır. Oluşan dizinin, çantanın boyutunu aşıp aşmadığı ile ilgili değerlendirme yapılacaktır.
A) 10m3/15kg
B) 15m3/5kg
C) 20m3/25kg
D) 25m3/15kg
E) 15m3/10kg
F) 20m3/10kg
1–> Çantada var
0–> Çantada yok
1-1-0-1-0-0 h=50m3, a=35kg, k=70
1-0-1-1-1-1 Hacim aşıyor. Çözüm değil.
Optimizasyon teknikleri, içerisinde 100’lerce algoritma bulunan ve gün geçtikçe yeni algoritmaların yayınlandığı çok geniş bir konudur. Biz Optimizasyon Teknikleri çatısı altında 3 farklı optimizasyon algoritması ele alınacaktır. Bunlar;
Genetik Algoritmaların temeli John Henry Holland tarafından atılmıştır. Genetik algoritmada ilk olarak başlangıç popülasyonları oluşturur. Daha sonra döngü içerisinde fonksiyonun durumuna göre çaprazlama, mutasyon, doğal seleksiyon işlemleri tekrar edilir.
Genetik Algoritma Aşamaları:
Başlangıç Popülasyonunu Oluştur
REPEAT
Çaprazlama
Mutasyon
Doğal Seleksiyon
UNTİL
Bu konuyu yine Gezgin Satıcı Problemi üzerinden vereceğimiz örneklerle inceleyeceğiz.
ÖRNEK SORU 2
A, B, C, D ve E şehirlerinin arasındaki mesafeler aşağıdaki mesafe matrisinde verilmiştir. Genetik Algoritma tekniğini kullanarak en düşük maliyetli çevrimi bulunuz. (Başlangıç popülasyonu 5, çaprazlama oranı %80, mutasyon oranı %20 )
A
B
C
D
E
A
25
10
30
30
B
25
20
35
10
C
10
20
25
30
D
30
35
25
30
E
30
10
30
30
MESAFE MATRİSİ
5 adet başlangıç popülasyonu oluşturmamız gerektiği soruda bizlere ifade edildiğinden ilk olarak bunu oluşturmamız gerekli. Popülasyon kromozomlardan, kromozomlarsa genlerden meydana gelir.
Burada rastgele oluşturacağımız bir C-E-A-D-B-C rotasına kromozom, bu kromozomun çözüm elemanlarından herhangi bir tanesine, meselâ B elemanına gen adı veriliyor.
C’den E’ye giden araç 30 birimlik mesafe katederken, E’den A’ya 30, A’dan D’ye 30, D’den B’ye 35, B’den C’ye geri dönerken ise 20 birimlik mesafe katedip toplamda 145 birimlik mesafe katetmiş oluyor. Bu durumda bu kromozomun maliyetini 145 birim olarak bulmuş oluyoruz.
Şimdi rastgele herhangi bir noktadan başlayarak tekrar aynı noktaya geri dönen toplam 5 adet kromozomumuzu oluşturalım.
C-E-A-D-B-C=145
E-B-A-D-C-E=120
D-C-B-A-E-D=130
A-B-C-D-E-A=130
C-A-E-B-D-C=110
Bu çözümler içerisinden en başarılısı 5. çözümdür çünkü minimum maliyet ondadır, aracın gideceği optimal minimum mesafeyi bulmamız gerektiğinden bu problem minimizasyon problemidir.
Çaprazlama İşlemi
Başlangıç popülasyonu içerisinden belirlenen oran kadar kromozomu-çözümü kullanarak yeni çözüm oluşturma işlemine çaprazlama adını veriyoruz.
Birçok çaprazlama yöntemi mevcut, bunlar;
Tek Noktalı Çaprazlama (One-point Crossover)
İki Noktalı Çaprazlama (Two-point Crossover)
Çift Noktalı Sıralı Çaprazlama (Linear Order Crossover (LOX))
Kısmen Haritalanmış Çaprazlama (Partially Mapped Crossover (PMX))
Bu yöntemler hakkında daha detaylı bilgi edinmek isterseniz aşağıdaki 1 numaralı akademik makaleye göz atabilirsiniz. Biz bu yöntemlerden çift noktalı sıralı çaprazlama yöntemini kullanacağız.
Çift noktalı sıralı çaprazlama yöntemi, rastgele seçtiğimiz 2 adet kromozom içerisinden rastgele ikişer adet nokta seçip seçtiğimiz bu iki nokta arasında kalan bölgeyi kromozomlar arasında geçiş yaptırarak yeni kromozom üretme yöntemi olarak isimlendirilebilir.
Çaprazlama oranı %80 olduğuna göre 4 adet çözümü çaprazlama için kullanacağız. Burada hangi çözümleri seçeceğimiz rastgele olarak da belirleyebiliriz ancak bizlere kolaylık oluşturması bakımından uygulayabileceğimiz farklı yöntemler de mevcut. Bu yöntemler:
Sıralama Yöntemi: Küçükten büyüğe doğru sıralanıp veyahut herhangi bir sıralama yapılmadan rastgele seçme yöntemi.
Turnuva Yöntemi: Mesela rastgele 3 tanesini seçip bunlar arasından en iyi iki tanesini alma yöntemi
Rulet Tekerleği Yöntemi: Çözümler başarı seviyelerine göre rulet tekerleğine yerleştirilir. Aralarından rastgele seçim yapılır.
Yukarıdaki yöntemler literatürde en çok kullanılan 3 yöntemdir. Bu ve buna benzer farklı seçim yöntemlerinin izahı ve karşılaştırılmasının yapıldığı 3 numaralı kaynaktaki (Uygun Arazinin Seçimi için Genetik Algoritmadaki Seçim Yöntemlerinin Belirlenmesi) konferans bildirisine ve 4 numaralı kaynaktaki (Genetik Algoritmalar için Seçim Metotları) adlı akademik yayına göz atıp bu yöntemler ile alakalı detaylı bilgi sahibi olabilirsiniz.
İki noktalı çaprazlama yöntemini rastgele seçtiğimiz 1. ve 4. çözümü kullanarak uygulayalım. Bu çözümler içerisinden yine rastgele seçeceğimiz 2. ve 4. düğümlerle düğümü 3 ayrı parçaya ayıralım.
C-E-2–A-D-4-B-C
A-B-2–C-D-4-E-A
Koyu renkle işaretlenmiş rastgele seçilen iki düğümün arasında kalan bölgeyi; üst kromozomun parçasını alta, alt kromozomun parçasını üste yazarak değiştireceğiz. Alttaki kromozomun CD parçasını yukarı çıkardığımızda sırasıyla soldan sağa kontrollerini genlerin parçada olup olmadığının kontrolünü gerçekleştiriyoruz. C geni CD parçası içerisinde mevcut ancak E geninin CD parçası içerisinde bulunmadığını görüyoruz bu yüzden en başa E genini yazacağız. Soldan sağa doğru ilerlediğimizde A geninin CD parçası içerisinde bulunmadığını görüyoruz bu yüzden E geninden sonra A genini yazacağız. D geni CD parçası içerisinde mevcut B geni ise parça içerisinde bulunmadığından dolayı CD’nin yanında B genini yazacağız. Son olarak oluşan yeni kromozomumuz E-A-C-D-B-E şeklinde oluşmuş oluyor. Aynı metodu alttaki kromozom için de uygularsak B-E-A-D-C-B şeklinde yeni kromozom oluşmuş oluyor.
Yeni kromozomlar ve
E-A-C-D-B-E =110
B-E-A-D-C-B =115
Rastgele 2 adet kromozom daha seçelim ve bunlar üzerinde de çaprazlama işlemini gerçekleştirip kromozom üretelim.
E-B-2–A-D–4-C-E=120
D-C-2–B-A–4-E-D=130
Çift noktalı sıralı çaprazlama yöntemini kullandıktan sonra oluşan yeni kromozomlar;
C-B-A-D-E-C=135
E-D-B-A–C-E=130
Popülasyonun %80’ine tekabül eden 4 adet kromozomun çaprazlama işlemini oluşturduk. Oluşan yeni kromozomlar algoritmanın doğal seleksiyon aşamasında bizlere yardımcı olacak ancak o aşamadan önce mutasyon işlemiyle farklı bir yöntem kullanarak yeni kromozomlar oluşturalım.
Mutasyon bir kromozomun gen sıralamasının değiştirilmesiyle farklı bir kromozom oluşturma işlemidir.
İlk kromozomu kullanarak yer değiştirme metoduyla 3. ve 4. genlerin yerlerini değiştirerek yeni bir kromozom elde edelim.
C-E-A–D-B-C=145 —-> 1. Kromozom
C-E-D–A-B-C=135 —-> Oluşan Kromozom
Yaptığımız tüm bu işlemlerden sonra elde ettiğimiz tüm kromozomları alt alta koyup başarısı en yüksek olan 5 tanesini alıp bitiriyoruz. Eğer istiyorsak bu 5 taneyi tekrar algoritmaya sokabiliriz.
C-E-A-D-B-C=145
E-B-A-D-C-E=120
D-C-B-A-E-D=130
A-B-C-D-E-A=130
C-A-E-B-D-C=110
E-A-C-D-B-E =110
B-E-A-D-C-B =115
C-B-A-D-E-C=135
E-D-B-A-C-E=130
C-E-D-A-B-C=135
10 tane kromozom arasında en kısa mesafeye gidenler maliyeti en düşük olanlar olduğuna göre bunlar sırasıyla 2., 5., 6.,7. ve 9. olarak alabiliriz. Son kromozomu hepsi 130’a eşit olduğu için rastgele 9. kromozom olarak aldım. Siz isteseniz maliyeti 130′ eşit başka bir kromozomu da 5. kromozom olarak ekleyebilirsiniz.
E-B-A-D-C-E=120
C-A-E-B-D-C=110
E-A-C-D-B-E =110
B-E-A-D-C-B =115
E-D-B-A-C-E=130
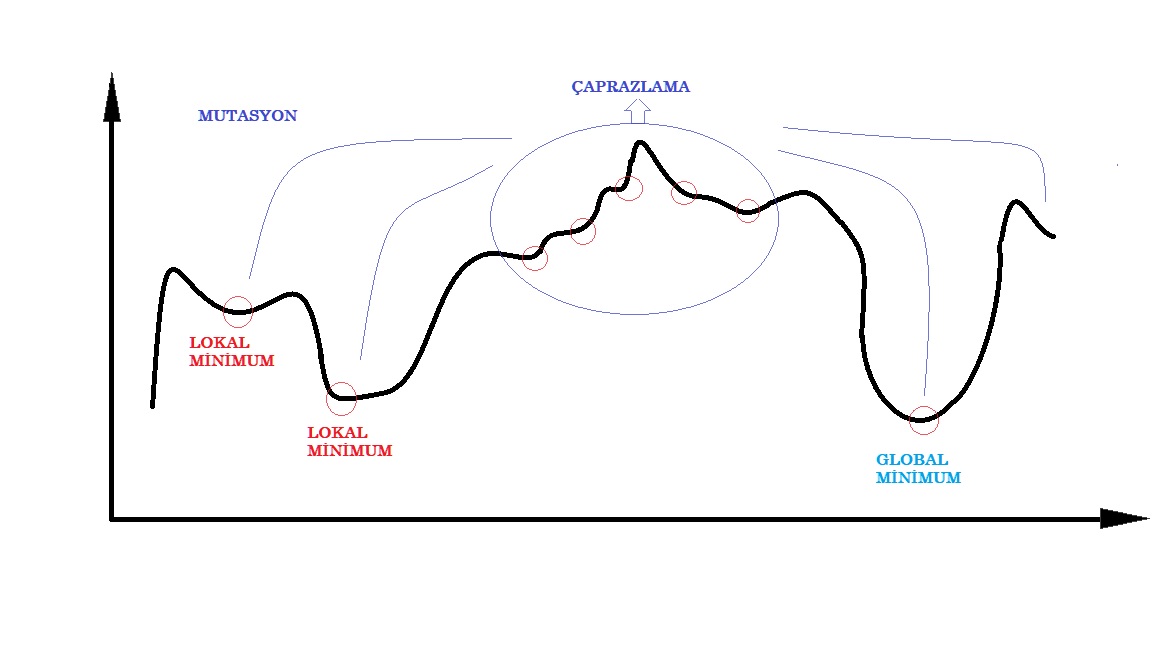
Burada yaptığımız işlemleri grafik üzerinde gösterip yaptığımız çaprazlama ve mutasyon işleminin amacını daha net bir şekilde görebiliriz. Çözmüş olduğumuz problemdeki çözümleri oluşturan kromozomların her birinin grafik üzerinde bir noktaya karşılık geldiğini varsayalım.
Her bir çukur noktasına lokal minimum noktası ismi veriliyor. Grafikteki en düşük ve bizim esas ulaşmak istediğimiz nokta ise global minimum noktası olarak adlandırılıyor. Çaprazlama işlemiyle iki çözüm noktası arasındaki veya çevresine göre daha başarılı olan komşu çözüm noktalarını buluyoruz. Eğer sadece çaprazlama işlemi yapsaydık komşu çözümler ve tek bir lokal minimum değer arasında kalırdık. Mutasyon işlemi ise bizlere bu lokal minimum değerler arasında sıçrama yapmamızı sağlıyor ve lokal minimum değerlerine takılıp o değerler arasında kalmamızı engelliyor. Mutasyon operatörüyle algoritmanın (grafiğin) farklı yerlerine sıçramalar gerçekleştirebiliyorum. Genetik algoritmada yerel arama (çaprazlama) için belirlenen parametre değerleri %80-%95 arasında, genel arama (mutasyon) için belirlenen parametre değeri %5-%20 arasındadır. Genetik algoritmada global ve lokal minimum noktaları ile alakalı 2 numaralı kaynaktaki uygulamalı Matlab örneğine göz atabilirsiniz.
Peki bu algoritmadaki REPEAT-UNTİL döngüsü ne zamana kadar devam edip ne zaman sonlanacak?
İyileşme periyodu kadar: Eğer belirlenen iterasyon sayısı kadar çevrim yapıp daha iyi bir çözüm üretemiyorsa algoritmanın aramasını durdurmasını sağlayabiliriz.
Kabul edilebilir hata seviyesi kadar: Belli bir hata seviyesinin altına inmiş çözümler kabul edilebilir sayılırsa.
Yapay sinir ağları sinapslara benzer ve bunu temel alarak bir öğrenme modeli oluşturur. Tek katmanlı (single-layer) ve çok katmanlı (multi-layer) olarak iki farklı yapıya ayrılırlar. Çok katmanlı yapay sinir ağlarına birden fazla gizli katman (hidden-layer) ekleyerek daha iyi sonuç elde edebiliriz. Ayrıca hangi aktivasyon fonksiyonunu belirlediğimiz de önemlidir.
Burada verilen bir veri seti üzerinde Matlab’de bu veri setini eğiterek sonuca ulaşmaya çalışacağız.
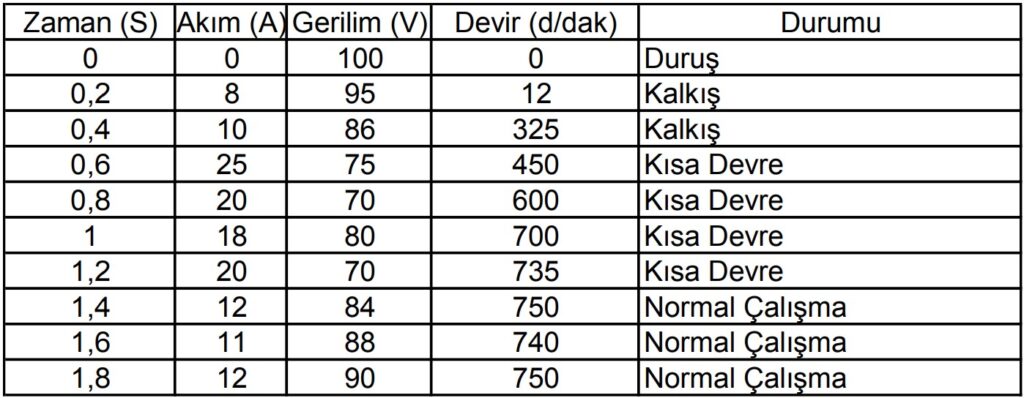
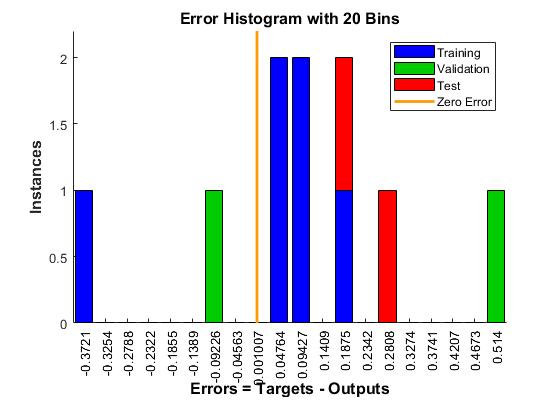
Bir Elektrik motorunun zamana bağlı ölçülen değerleri aşağıda verilmiştir. Bu değerleri kullanarak Matlab te ileri beslemeli sinir ağı kullanarak motorun durumunu tespit etmek için m file yazınız. Ağa ait bütün parametreleri komut satırından giriniz. Ayrıca ağırlık ve eşik değerlerini başlangıçta değerlerini rastgele atama yapınız. Ağın performansını ve Öğrenme durumunu gösteren grafiklerini, giriş verileri ile elde edilenler arasındaki ilişkiyi gösteren grafikleri ve tercih ettiğiniz ağ topolojisini açıklayınız.
Bize verilen örnek elektrik motorunun zamana bağlı durumu gözükmektedir. Motorun 4 farklı durumu bulunmaktadır. Bunlar duruş, kalkış, kısa devre ve normal çalışma olarak tanımlanmış. Bizlere ileri beslemeli sinir ağı yapısını kullanarak ağı eğitip sonuçlara ulaşmamızı istemiştir. Ayrıca ağa ait sinir hücresi sayısı ve iterasyon değerlerini kendimizin belirlememizi istemiş.
Tabloya baktığımızda zaman içerisinde değişkenlik gösteren 3 ayrı değer ve bunları sonuçları olarak bizlere verdiği 4 adet farklı durumlara sahip 10 birimlik bir vektör bulunuyor. Çözüm olarak matlabı kullanacağız ve verileri elle gireceğiz. Ayrıca veriler bir excel dosyasında oluşturulup matlab’e import edilebilir.
Bizden yalnızca ileri beslemeli istediği istediği için zaman verisini kullanmayacağız. Ancak zaman serisi deseydi timeseriesfeedforwardnet çözümünü kullanabilirdik.
Optimizasyon genelde 0-1 arası yapıldığı için ben de bu şekilde yaptım ancak artan bir vektör olarak göstermemin hata olduğunu da biliyorum. Siz daha iyi optimizasyon yapabilirsiniz.
0 ->Duruş 0,25 ->Kalkış 0,75 ->Kısa devre 1 ->Normal Çalışma
Giriş değerlerini matris içerisinde tanımladık. Çıkış değerlerini de tek boyutlu dizi (vektör) şeklinde oluşturduk. Şimdi sıra sinir hücresi sayısını (ağın boyutunu) belirleyip, giriş verilerinin orta noktasını belirleyip ağırlık değerleri olarak belirlemektir. Bu işlemleri ise;
Bias değerlerini sinir hücresi sayısı kadar aldık. Şimdi ağımızı oluşturalım.
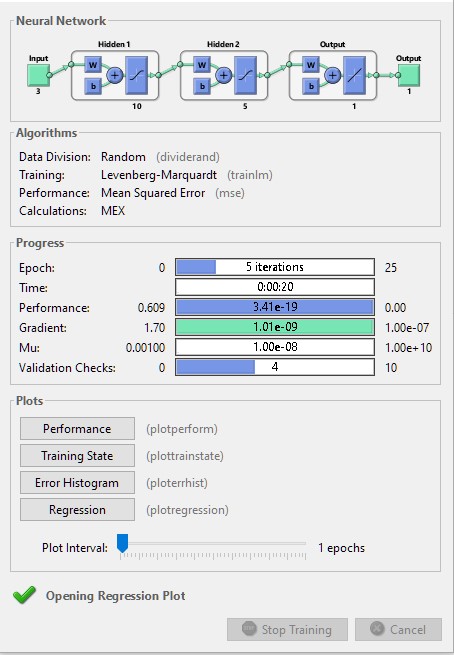
net=feedforwardnet([10 5]);
Ağımızı ileri beslemeli sinir ağı olarak eğitmemizi istediği için feedforwardnet() fonksiyonunu kullanıyoruz. Köşeli parantez içerisinde ise gizli katman (hidden-layer) sayısını belirliyoruz. Hidden layerlar daha komplike problemlerde çözüme ulaşmak için de kullanılabilir. Ayrıca hidden-layer olmadan da çözümleme yapabilirsiniz.
Şimdi kullanacağımız iterasyon sayısını kullanıcıdan isteyelim.
Kullanacağımız iterasyon sayısını kendimiz belirlememiz problemi ikinci ve üçüncü defa eğitecek olursan hangi iterasyonda çözüme daha fazla yaklaşacağı hususunda bizlere bilgi sağlar. Şimdi eğitimdeki maksimum doğrulama hata sayısını ve eğitimin süresini girelim (inf=infinity).
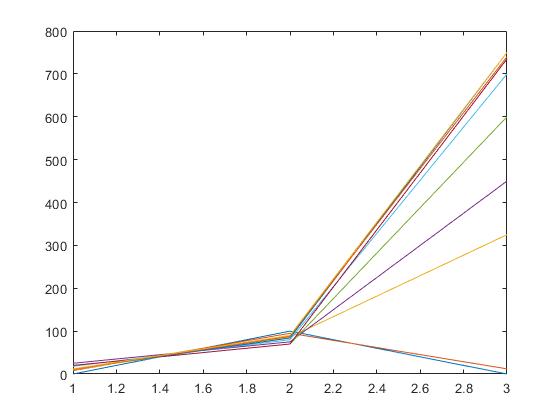
Şimdi giriş matrisini grafik olarak çizdirelim. Daha sonra sırasıyla ağ, giriş ve hedef verilerini verip ağı eğitelim. Son olarak giriş verilerini ağa vererek eğitilmiş ağın tahmin edilen değerlerini oluşturalım.
Sinir hücresinin ağırlık ve eşik değerlerini gösterelim. Son olarak ise eğitim de ulaştığımız çıktı değerlerini ve hedef değerlerini art arda gösterip görüntüleyelim.
disp('Çıktılar:');
y
disp('Hedef Değerleri:');
hedef
Elde ettiğimiz çıktı değerleri aşağıda gösterilmektedir.
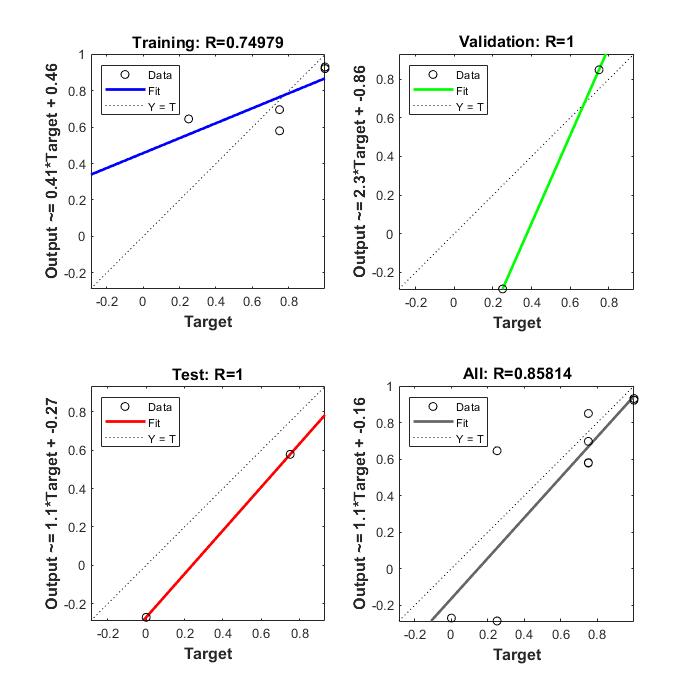
Şimdi ulaştığımız sonuçları gözlemleyelim. İlk değerlerde hedef değerlere göre daha az yakınsayan sonuçlar gözükse de sonlara doğru sonuçlara daha fazla yakınlaştığını görüyoruz.
Oluşturduğumuz ağ yapısı yukarıda gözükmektedir.
Ağ Grafiği
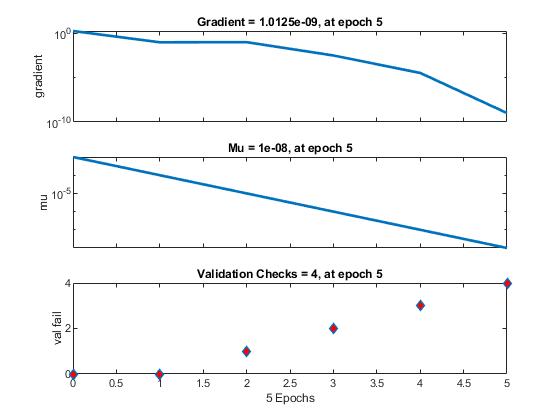
5 İterasyon sonunda ölçü değerinin hedef değere yakınsamasını görmektesiniz. Gradyan değerinin düşmesi sonuca yaklaştığımız anlamına geliyor. 10^-8 de en doğru sonuca ulaştığını görüyoruz
4. Grafiği incelediğimizde verdiğimiz hedef verilerine %86 oranında yakınlaştığını görüyoruz. Yani bu veri setinin ilk eğitiminde %86’lık sonuç elde ettik. Birkaç defa eğiterek daha yüksek sonuçlara ulaşabiliriz.
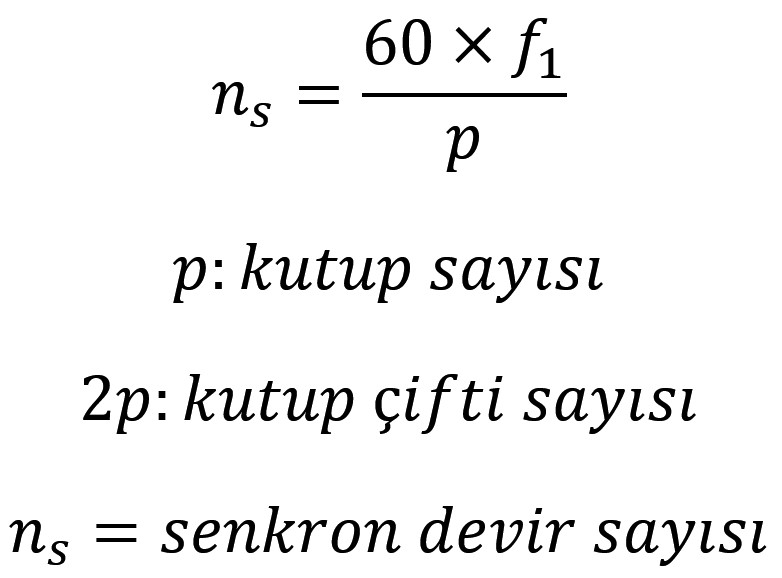
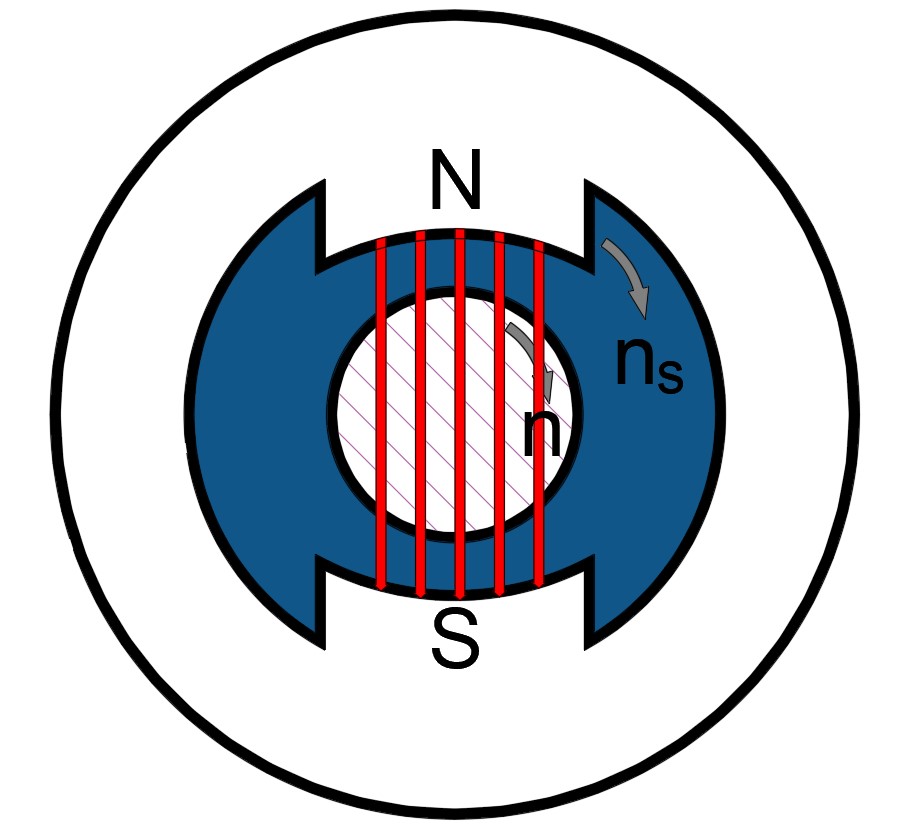
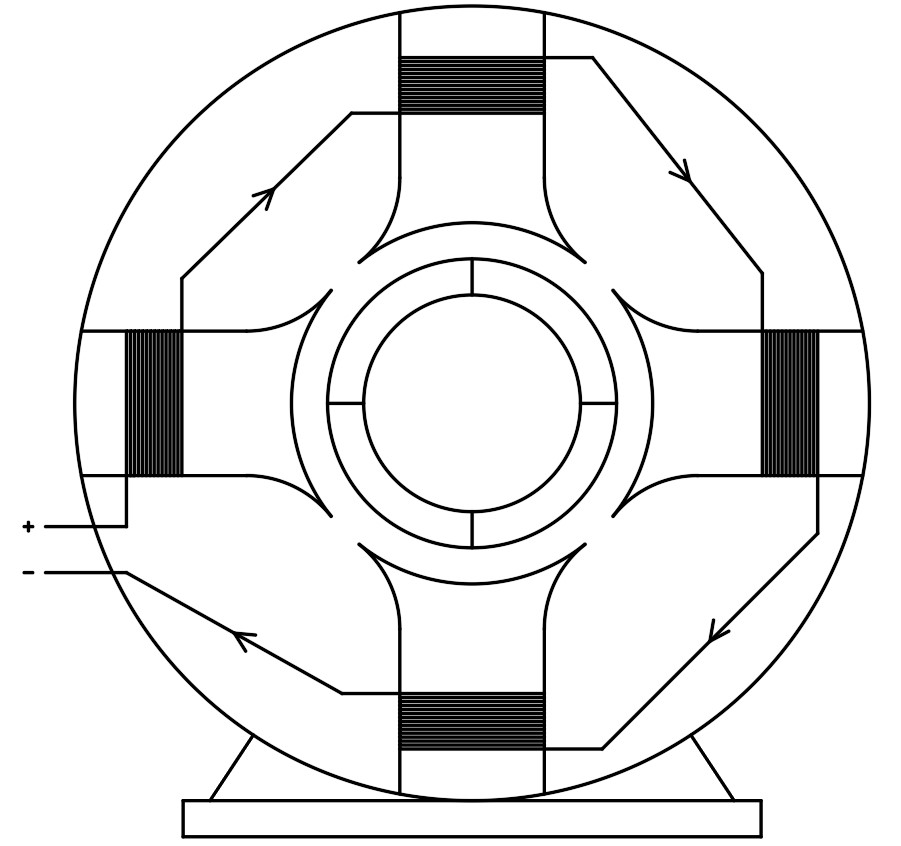
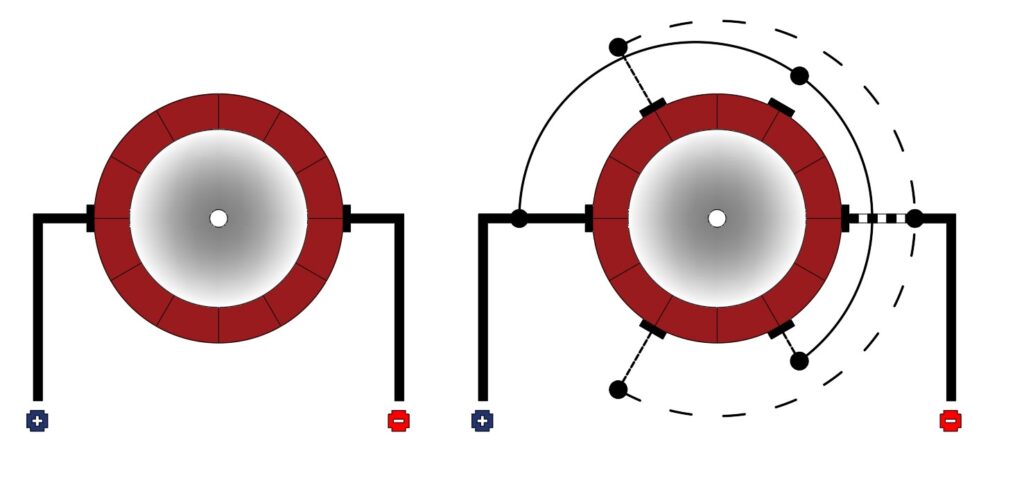
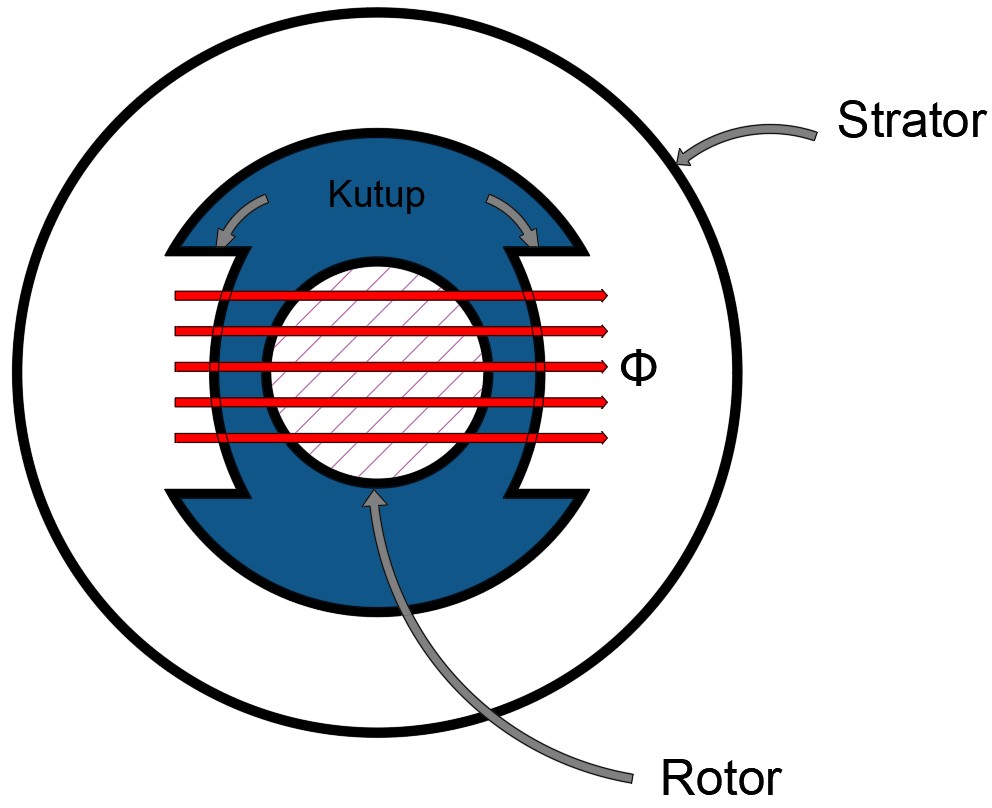
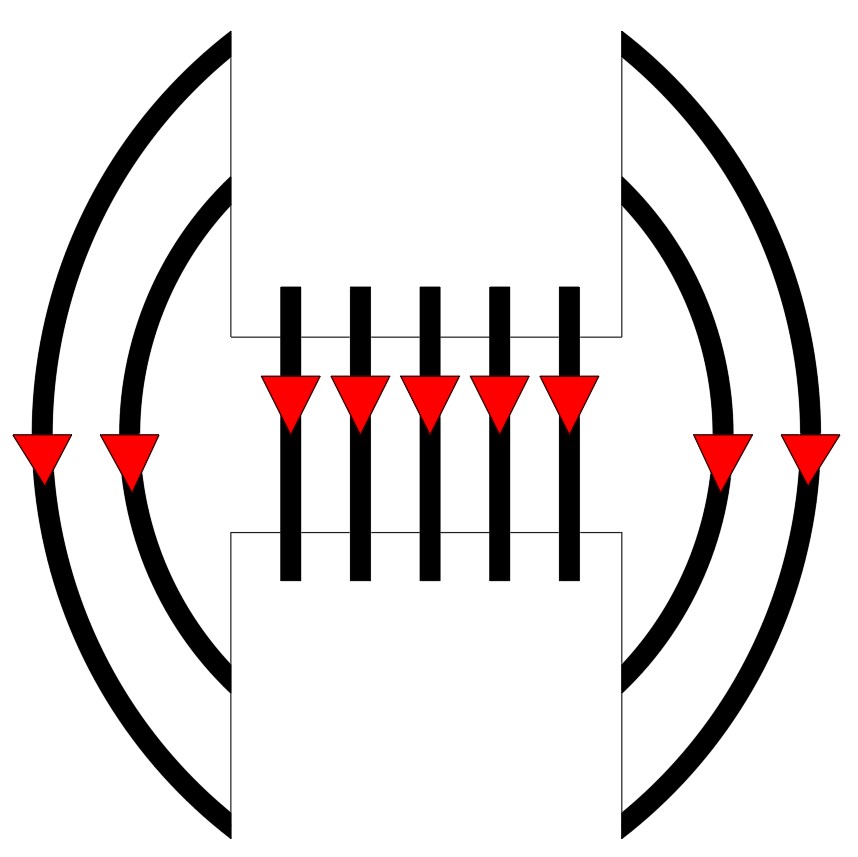
Makinenin stratoruna yerleştirilen 3 fazlı veya çok fazlı sargıya uygulanan aynı faz sayısındaki alternatif akımın oluşturduğu bileşke Φm akısı zamana göre sabit maksimum değer ile hava aralığı çevresinde döner. Böylece rotorda bulunan sargıları çevreleyen bu akı rotor sargılarında Faraday Kanunu’na göre alternatif bir gerilim ve akım endükler. İletkenlerdeki bu akım hareket halinde bulunan alan dahilinde BIOT-SAVART kanununa göre bir kuvvet oluşturur, iletkenin bir ucuna etkiyen bu kuvvet diğer yönde aksi istikamette olacağı için rotor merkezine göre bir moment meydana getirir (aşağıdaki şekilde görüldüğü gibi) ve rotor hareket eder. Rotorun erişmesi muhtemel en büyük hız;
Senkron devir sayısına eşit olur. Fakat makine bu hıza hiçbir zaman erişemez, zira bu hızda, döner alan hızı rotor iletkenlerinin hızına eşit olacağından (relatif hız sıfır olur), iletkenlerde gerilim ve akım, dolayısıyla döndürme momenti oluşamaz. Eğer makine bu hıza çıkartılmış olsa bile, dış kuvvet ortadan kalkınca makine ns’den daha küçük bir n değerine düşer. Bu hız ise makineye uygulanan fren momentine bağlıdır.
ROTOR ÇUBUKLARINDA MOMENT ENDÜKLENMESİ
KAYMA
Asenkron makinanın çalışma prensibinde bahsedilen rotorun dönme hızı ile döner alanın hızı arasındaki relatif ilişkiye kayma denir. Rotor hızının senkron hıza göre relatif olarak değiştiğini belirtir. “s” ile gösterilen kayma, genellikle 0 ile 1 arasındadır. Bu bağıl ifade çoğu kez yüzde oılarak verilir. Kayma aşağıdaki gibi tanımlanır.
Dikkat edilirse s kayması, ns ve n’nin değerlerine bağlı olarak değişmektedir. Buradan kaymanın farklı değer aralıklarında makinanın farklı işletme koşullarında çalışacağı ortaya çıkar.
Generatör Çalışma
Döner alanın hızının yönüne ait işaret pozitif ve referans olarak alındığı takdirde, rotorun dönüş hızı, ns senkron hızının üzerine çıktığı taktirde, kayma negatif değer alır. Makine ns’in üzerine kendi kendine çıkamayacağına göre bir dış tahrik makinası ile çıkartılmalıdır. Böylece n devir sayısına bir limit koyulamayacağı için kayma,
arasında değişecektir.
Bu şartlar altında makinede endüklenen gerilim şebeke geriliminden büyük olacağı için akım 180° yön değiştirerek şebekeye doğru akacaktır.
Motor Çalışma
Bu çalışma durumunda, elektrik enerjisi mekanik enerjiye dönüştürülmektedir. Makinada döner alan ve rotor hızı aynı yöndedirler. Haliyle üretilen gerilim şebeke geriliminden ufaktır. Makine mekanik enerji üretmek ve muhtelif kayıplarını karşılamak için şebekeden enerji çekmektedir. Motor çalışma motor devir sayısının sıfır olması haline kadar sürer.
Transformatör Çalışma
Kaymanın bire eşit olduğu zamandur.Yani rotor dumaktadır.Statorda meydana gelen alani aynen trafoda olduğu gibi rotor sargılarında bir gerilim üretir. Ancak rotora uygulanan firen momenti, oluşan döndürme momentinden büyükse rotor dönemez ve trafo gibi çalışır. s=1 olur.
Fren Çalışma
Çalışmakta olan bir makinada döner alan yönünün iki fazın yeri değiştirilerek aksedilmesiyle ns -> -ns olur. Bu durumda bir yönde dönmeye devam eden makinanın aksi yönde dönmeye zorlanması söz konusu olmaktadır. Böylece makinaya döndüğü yönün aksine fren momenti uygulanmış olur. Bu nedenle bu çalışma usûlüne fren çalışma denir. Makinanın kayması pozitif olur ve 1’in üzerine çıkar.
Aksi yönde döndürülmeye gayret edilen makine süratle yavaşlar ve devir sayısı (n=0) olur. Buna müteakiben makine aksettirilen döner alan yönünde dönmeye başlar. Eğer makinenin aksi istikamette dönmesi istenmiyorsa, şebeke anahtarı açılarak makine enerjisiz bırakılır.
DC Kompunt Motorlar’da hem şönt hem de seri alan sargıları kullanılır. İki sargının birleşik etkisi ile toplam akı meydana gelir. Şönt alanın etkisi seri alana göre çok yüksektir. Seri alan şönt alanı kuvvetlendirirse makine “arttırmalı veya eklemeli kompunt”, seri alan şönt alanı zayıflatacak yönde ise makine “azaltmalı veya çıkarmalı kompunt” olarak adlandırılmaktadır.
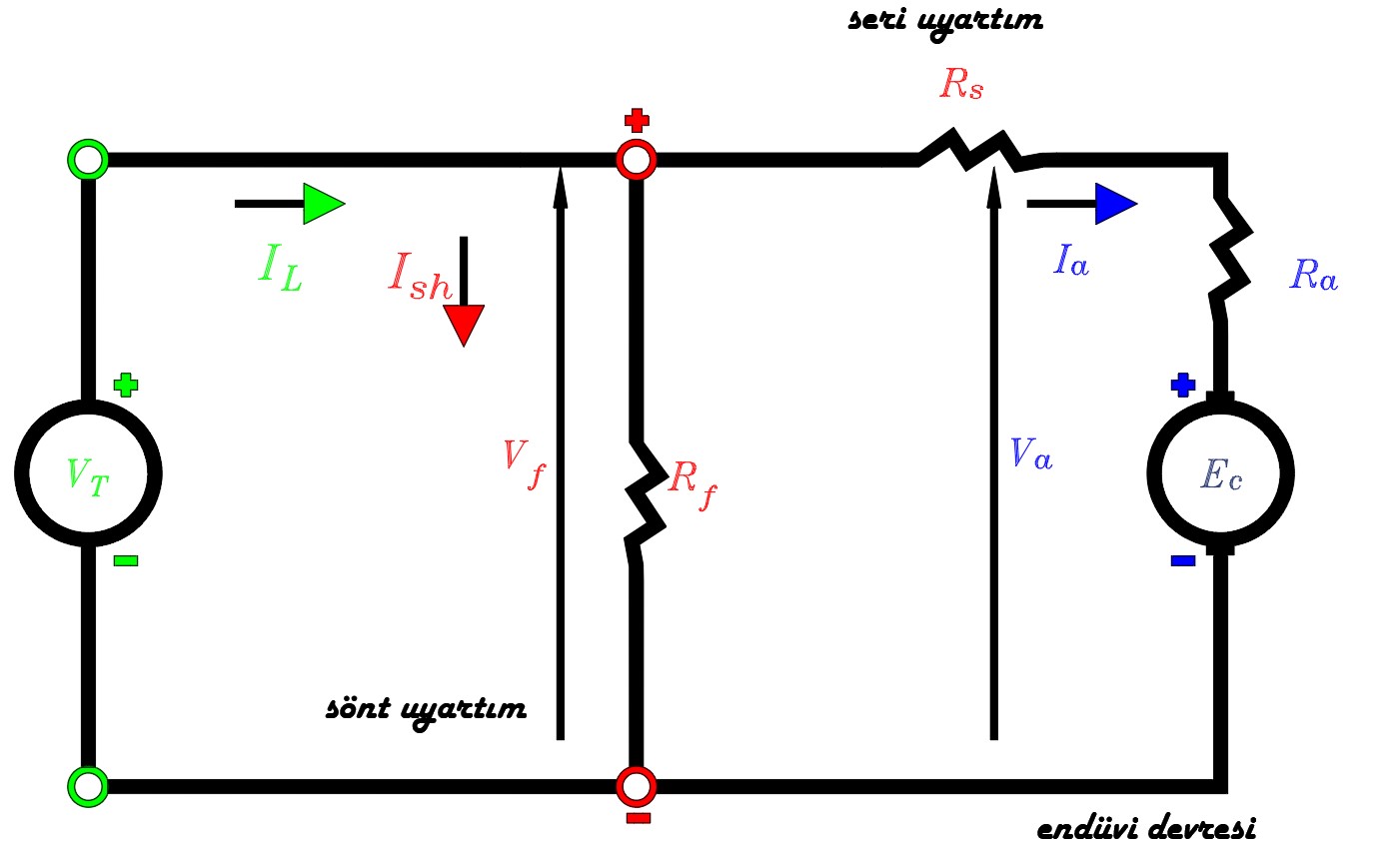
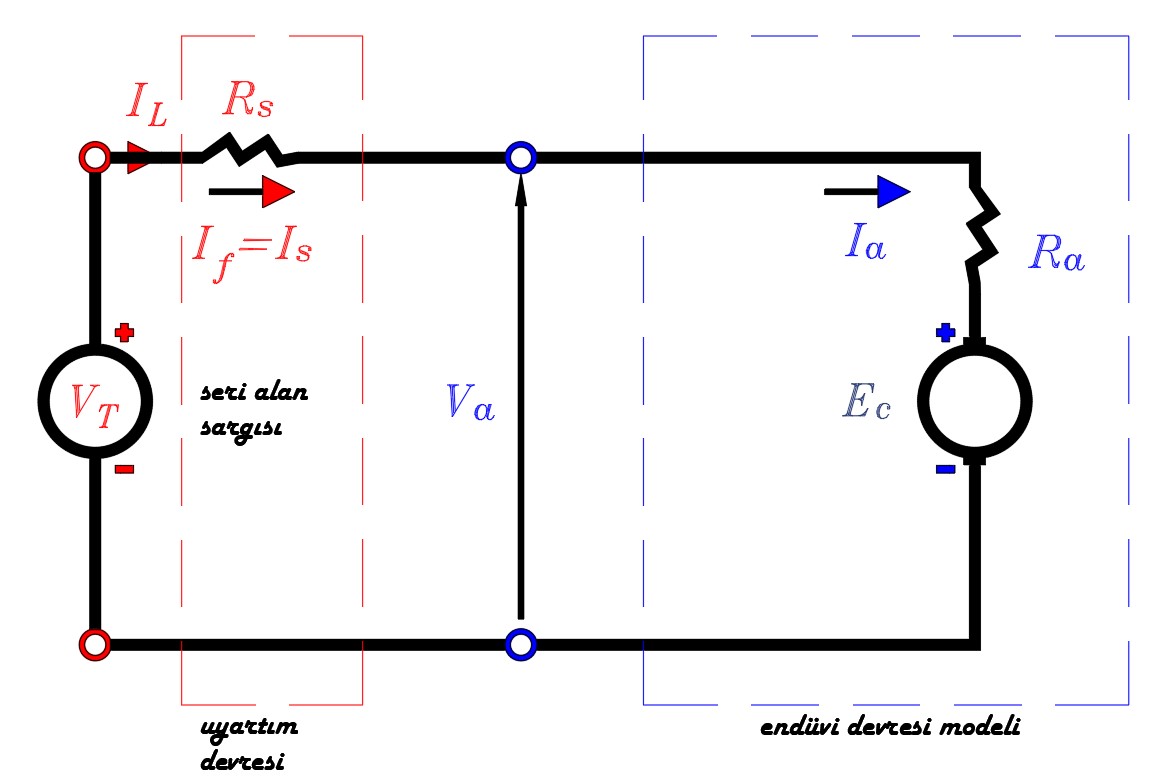
Seri alan sargısının endüvi sargısı ile seri bağlı ve şönt sargının kaynağa paralel bağlandığı şekle “uzun şönt kompunt” motor denir. Seri sargının kaynağa seri bağlı ve şönt sargının endüvi uçlarına paralel bağlandığı şekle ise “kısa şönt kompunt” motor denir. Burada analizlerde aşağıdaki devrede gösterilen “uzun şönt kompunt” motor kullanılacaktır.
UZUN ŞÖNT KOMPUNT DC MOTOR DEVRESİ
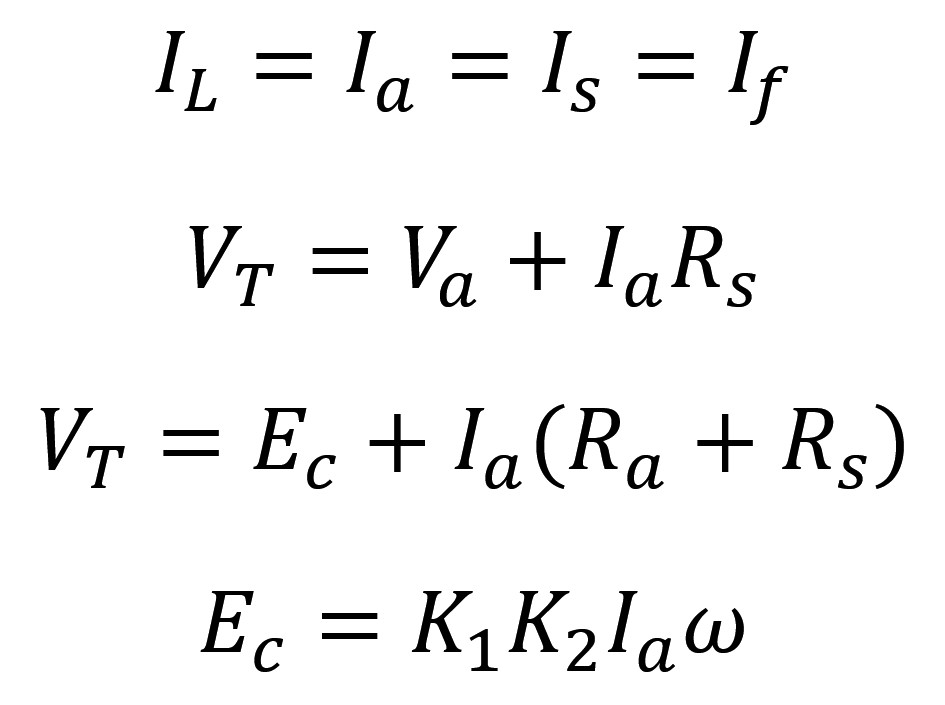
Arttırmalı DC Kompunt Motorlarda alan akısı;
Motorun doğrusal mıknatıslama bölgesinde çalıştığı kabul edilirse, K3 ve K4 sabitleri şönt ve ser, sargı parametrelerini temsil ederler. Azaltmalı kompunt motorda alan akısı;
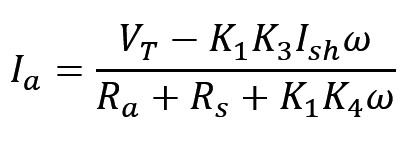
Yukarıdaki denklemlerde ilk terimler sabit iken ikinci terimler endüvi akımıyla (ve böylelikle motor yükü ile) doğrusal olarak değişir. Yukarıdaki şekildeki devreden yük akımı, uyartım akımı, endüvi gücü ve moment denklemleri yazılabilir.
Endüvi gücü;
Endüvi momenti;
Zıt emk;
Yukarıdaki Zıt emk’nın denkleminden arttırmalı ve azaltmalı kompunt motorların akı denklemi yerine yazılarak yeni Zıt emk denklemi;
Bu zıt emk denkleminde ± yerine pozitif işaret arttırmalı kompunt, negatif işaret ise azaltmalı kompunt için kullanılır. Elde edilen bu denklemler ile kompunt motorun performans analizi kolayca yapılabilir. Endüvi gücü ve terminal gerilimi denkleminden anma akımı-anma gücü (Ia-Pa) ilişkisi elde edilebilir.
Bu denklem seri motor denkleminin aynısıdır. Şönt motor denkleminde Rf=0 kabul edilirse yine aynı sonucu verir.
Endüvi gücü-Zıt emk denklemleri kullanılarak;
Denklemi elde edilir.
Arttırmalı ve azaltmalı motorun akı denklemlerinde tanımlanan ∅f değeri yukarıda yeni tanımlanan endüvi moment denkleminde yerine konulursa, kompunt motorun ürettiği moment ifadesine ulaşılır.
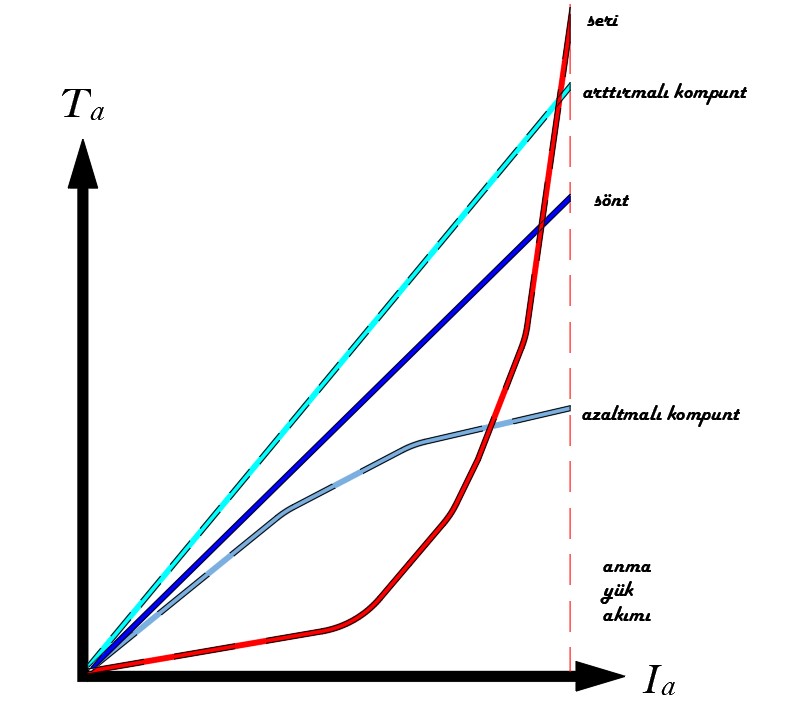
Yukarıdaki denkleme göre kompunt motor tarafından üretilen momentin aşağıdaki şekilde gösterildiği gibi hem şönt hem de seri motor karakteristiklerinin bileşkesi olduğunu göstermektedir. Arttırmalı Kompunt Motor aynı endüvi akımında şönt motordan daha yüksek moment üretmektedir. Azaltmalı Kompunt Motor ise aynı endüvi akımında şönt motordan daha düşük moment üretmektedir.
DEĞİŞİK BAĞLANTILI DC MOTORLAR İÇİN ÜRETİLENMOMENT-ENDÜVİ AKIMI EĞRİLERİNİN KARŞILAŞTIRILMASI
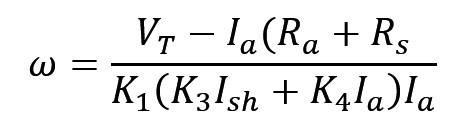
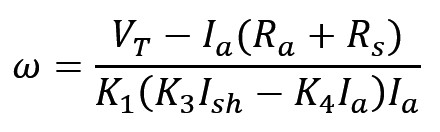
Kompunt motorun zıt emk gerilim denklemi ve terminal gerilim denklemi kullanılarak motor açısal hızı endüvi akımı ile ifade edilebilir.
Yukarıdaverilen Kompunt Motor hız denkleminde ± yerine + işareti konulursa Arttırmalı Kompunt Motor hız denklemi olan;
Elde edilir. Bu denklemde endüvi akımı artarsa yani motor yükü artarsa pay azalırken payda artar ve motor hızı azalır. Aşağıdaki şekile dikkat edildiğinde Arttırmalı Kompunt Motor’da hız düşmesi oranı şönt motora göre daha fazladır.
Azaltmalı Kompunt Motor’da ise yukarıdaki denklemde ± yerine – işareti yazılmalıdır.
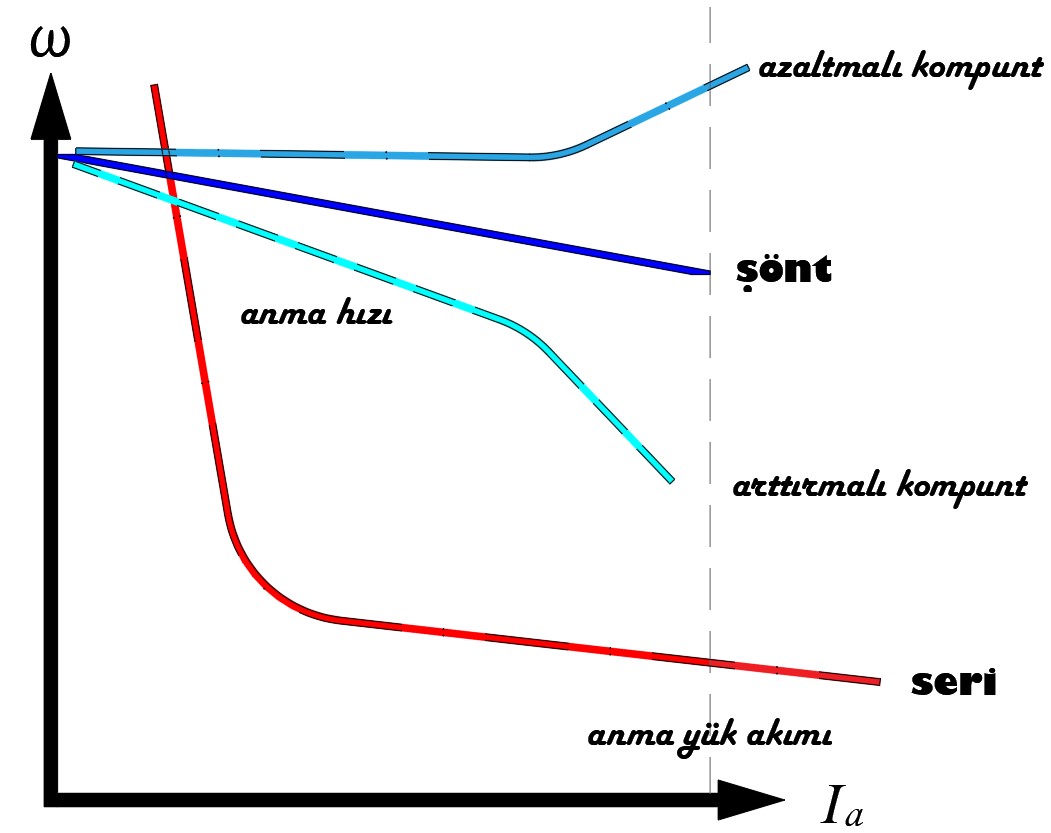
DEĞİŞİK BAĞLANTILI DC MOTORLAR İÇİN HIZ-ENDÜVİ AKIMI KARAKTERİSTİKLERİNİN KARŞILAŞTIRILMASI
Azaltmalı Kompunt Motor’da yük arttıkça payda azalır, devir sayısı artar. Eğer K1 (K3*Ish -K4*Ia )Ia değeri sıfıra yaklaşırsa motor devir sayısı çok tehlikeli bir şekilde artar ve motor kontrolü kaybedilir. Azaltmalı kompunt motor yapısından kaynaklanan kararsızlık nedeniyle pratikte çok nadir kullanılır.
MOMENT-HIZ KARAKTERİSTİĞİ
Kompunt motorun moment-hız karakteristiği seri ve şönt motorun karakteristiğinden elde edilebilir. Kompunt motorun ürettiği moment ifadesinden;
yazılır.
Burada;
Tsh=K1K3IshIa
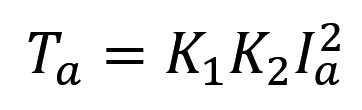
Ts=K1K4Ia2
Hızın bir fonksiyonuolarak motor açısal hız denkleminden elde edilen endüvi akımı;
Yukarıda elde ettiğimiz endüvi akımı değeri Kompunt Motor’un ürettiği moment ifadesinde yerine konulursa elde edilen yeni denklem;
Bu moment denkleminden Kompunt Motor’un şönt ve seri alanların katkısıyla oluşan iki moment bileşenine sahip olduğu görülür.
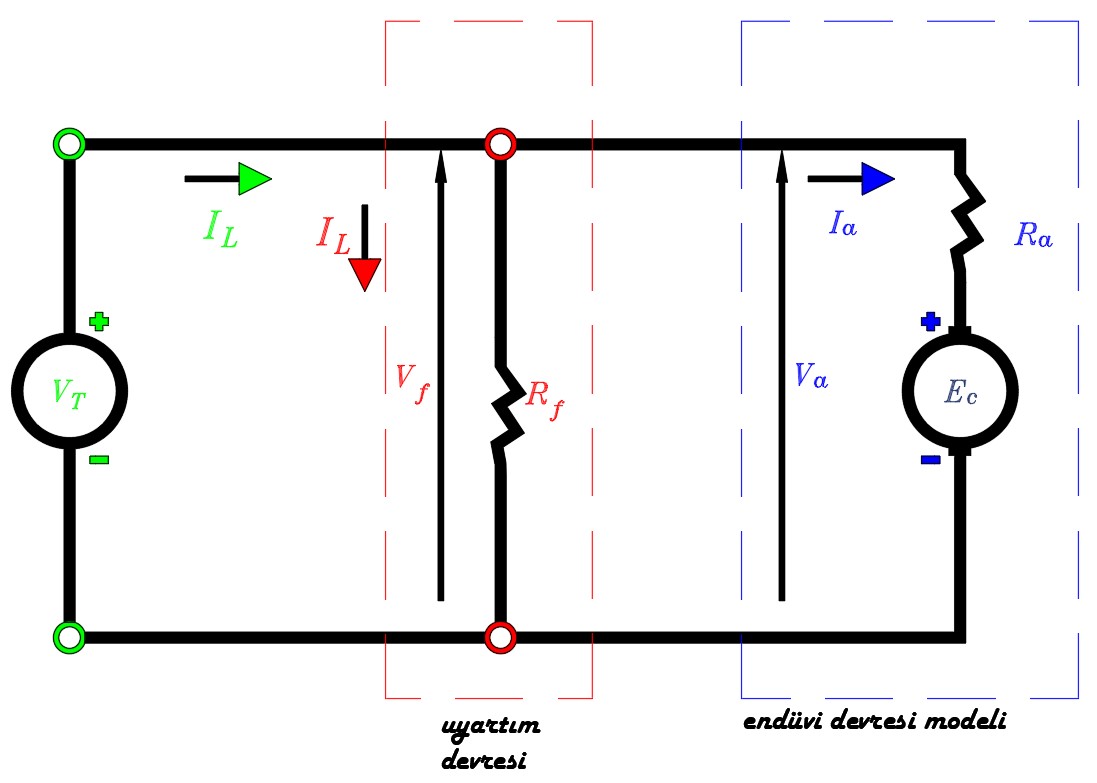
Aşağıdaki şekilde gösterildiği gibi şönt motorda alan sargısı ile endüvi sargısı paralel bağlıdır. Uyartım sargısı direnci Rf ile gösterilir.
DC ŞÖNT MOTOR DEVRESİ
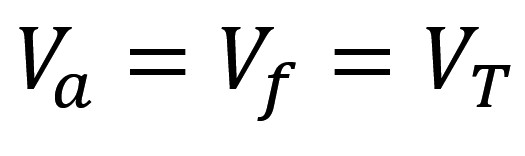
Endüvi uç gerilimi Va, Uyartım Gerilimi Vf ve uygulanan Kaynak Gerilimi veya Terminal Gerilimi VT aynıdır.
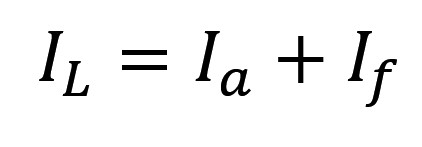
Hat akımı veya yük akımı IL, endüvi akımı Ia ile uyartım akımının yani If’nin toplamına eşittir.
Uyartım akımı;
olur.
Devrenin Gerilimi ise;
Burada zıt emk gerilimi yani Ec;
olarak yazılabilir. Yukarıdaki sabitler;
olarak yazılırsa zıt emk yani Ec;
olarak kısa bir şekilde yazılabilir. Sabit kaynak gerilimi ve alan direnci şartında zıt emk değerinin endüvi hızı ω ile orantılı olarak değiştiği görülür.
ENDÜVİ GÜÇ-AKIM KARAKTERİSTİĞİ
Endüvide üretilen güç ifadesi;
Yerine yukarıda görüldüğü gibi doğru akım şönt motor devresinin gerilim denkleminden zıt emk değerini çekerek;
yazılabilir.
Seri motor endüvi güç denkleminde Rf=0 yapılırsa , şönt motor endüvi güç denklemine eşit olur.
Endüvide üretilen gücün maksimum değeri;
Bunu sağlayan akım değeri;
Normal çalışma bölgesinde endüvi akımını bulurken karekökün önündeki işaret negatif alınır. Yani endüvi akımı;
Eğer IaRa ihmal edilirse endüvi akımının yaklaşık değeri;
Denklemine göre hesaplanır. Bu denkleme göre kaynak gerilimi sabit iken endüvi akımının endüvide üretilen güç ile yaklaşık olarak orantılı değiştiği söylenebilir.
DC Şönt Motorun tipik Pa-Ia eğrisi aşağıda verilmiştir.
ENDÜVİ MOMENT-HIZ KARAKTERİSTİĞİ
Endüvide üretilen moment yani Ta;
Endüvi gücünün açısal hıza oranlamasıyla bulunur.
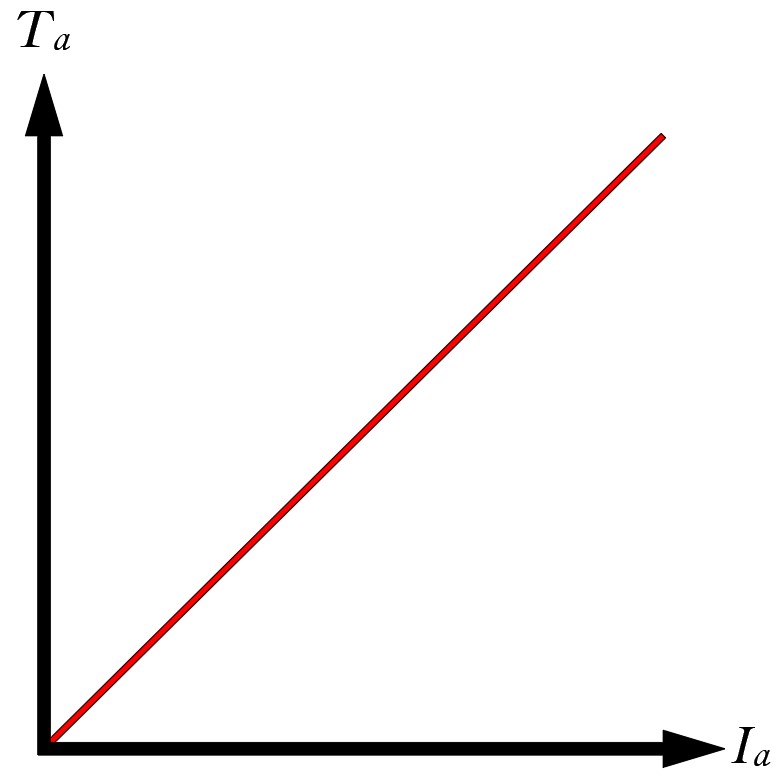
olarak elde edilir. Bu denkleme göre DC Şönt Motor’da endüvi iç momentinin endüvi akımı ile doğru orantılı olarak değiştiği görülür.
olarak ifade edildiğine göre açısal hız yani ω;
Endüvi akımı yani Ia ile ifade edilebilir.
Bir DC Şönt Motor’da Endüvi Momenti’nin Endüvi Akımı ile değişimi
Yüksüz durumda VT=0 olduğundan açısal hız yani ω0;
olur. Yüksüz ve yüklü durumdaki açısal hız denklemleri birbiri ile kıyaslandığında ise;
denklemi elde edilir. Burada Ra/Ksh değeri genellikle çok küçüktür ve ihmal edilebilir. Bundan dolayı pratikte DC Şönt Motorlar genellikle sabit devirli motorlar olarak kabul edilirler. Hızın endüvi akımı ile değişim eğrisi aşağıdaki resimde verilmiştir.
MOMENT-HIZ DEĞİŞİMİNİ BULURKEN;
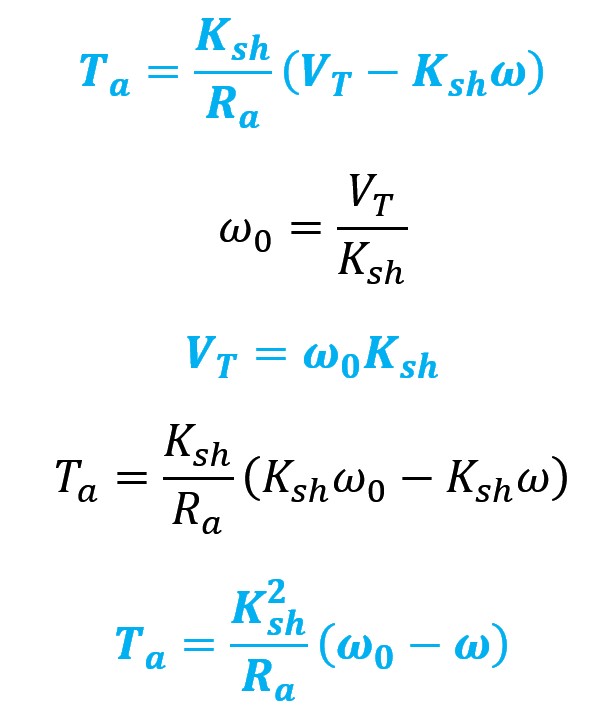
olduğuna göre biz moment ile açısal hızın değişimini bulacağız bunun için elde edeceğimiz denklem için Ia değerini çekip Ta eşitliğinde yerine koyacağız.
olarak Ia değerini çekeriz.
Bunu yerine koyduğumuzda ise;
olarak elde edilir. Bu denklemi aynı zamanda açısal hızın yüksüz olduğu durumdaki denklemden VT değerini çekerek açısal hızın yüksüz ve yüklü olduğu durumlardaki değerler verildiğinde de moment değerini bulabiliriz.
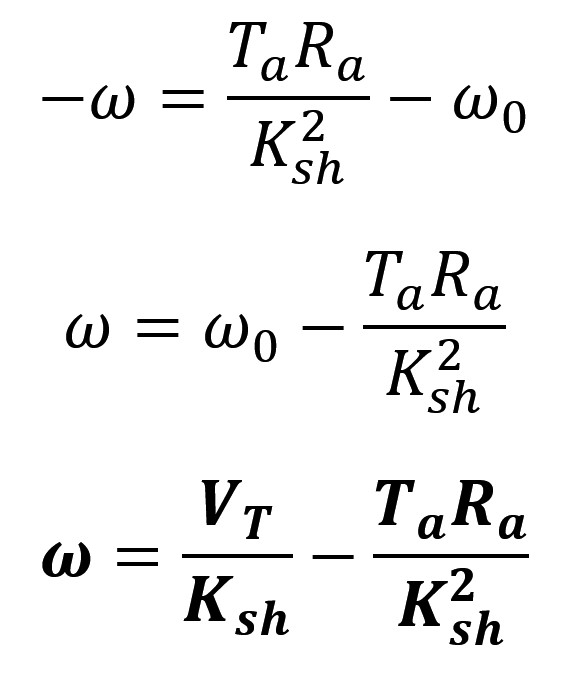
MOTOR HIZININ MOMENTE GÖRE DEĞİŞİMİNİ BULMAK İÇİN ise bir üstteki denklemden açısal hızı çekip;
olarak yazabiliriz.
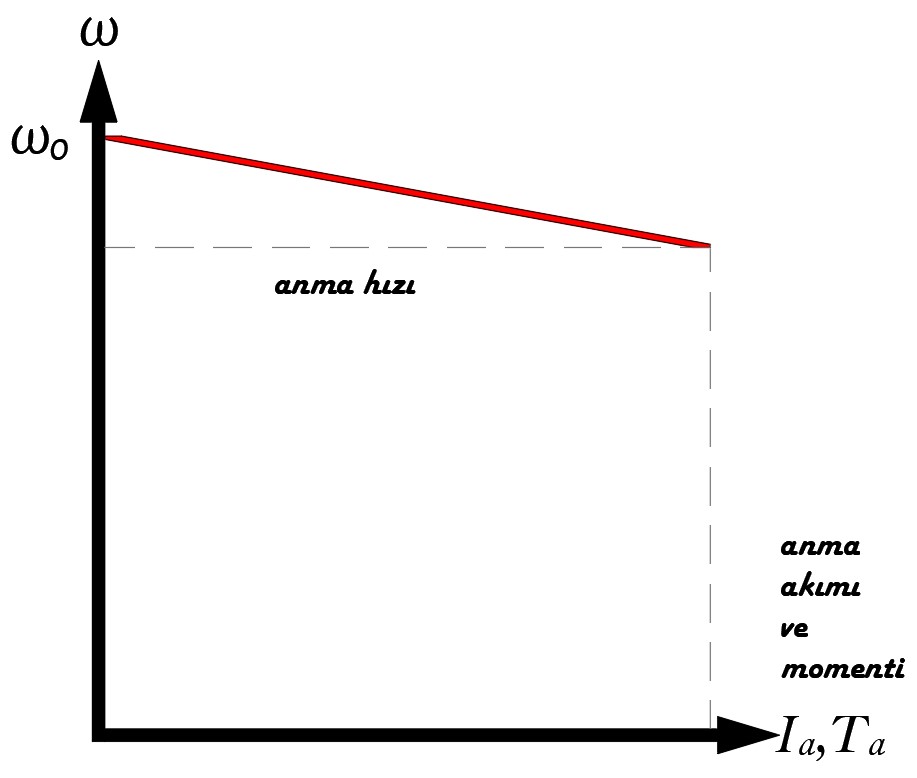
MOMENT-HIZ EĞRİSİ yukarıdaki şekilde gösterilen AKIM-HIZ EĞRİSİ’nin aynısıdır ve böyle olduğu için de aşağıdaki şekilde görüleceği üzere moment ve akım değerleri aynı yatay düzlemde gösterilmiştir.
DC ŞÖNT MOTOR DEVİR SAYISININ ENDÜVİ AKIMI VEYA MOMENTİ İLE DEĞİŞİMİ
ÖRNEK SORU:
230V DC Şönt Motorun Endüvi Direnci 0,25Ω ve uyartım direnci 150Ω’dur. Motor yüksüz olarak 1200 d/d hız ile dönerken kaynaktan IL=4A akım çeker. Tam yükte ise endüvi akımı Ia=45A olmaktadır.
a) Yüksüz iken endüvi akımını,
b) Yüksüz iken endüvi gücünü,
c) Tam yükte verimi,
d) Tam yükte d/d olarak hızı hesaplayınız.
ÇÖZÜM:
a) Yüksüz durumda iken Endüvi Akımı:
b) Yüksüz durumda iken Endüvi Gücü;
c) Tam yüklü durumda verim;
Net çıkış gücü; endüvi tam yük gücünden yüksüz gücünün yani döner kayıpların çıkarılması sonucu elde edilir.
DC seri motorlarda alan sargısı ile endüvi sargısı seri bağlıdır. Alan sargısı RϞ ile gösterilir. Aşağıdaki modelde görüldüğü gibi endüvi akımı, uyartım (alan) akımı ve yük akımı aynıdır.Uç gerilimi VT ise endüvi uç gerilimi ile uyartım direncine düşen gerilimlerin toplamına eşittir.
DC Seri Motor Devresi Modeli
olarak yazılabilir. Bundan sonra DC seri motorun performans analizi için kullanışlı denklemler çıkarılabilir. DC seri motorun temel performans karakteristikleri çıkış değişkenlerine göre çıkarılır. Pratikte endüvi akımı, moment ve hızınçıkış gücüne karşı değişiminigösterenperformans karakteristiği istenir.
ENDÜVİ GÜÇ-AKIM (Pa-Ia) KARAKTERİSTİĞİ
Endüvide üretilen güç;
Olarak verilir. Denklemde Ec değeri yerine konulursa;
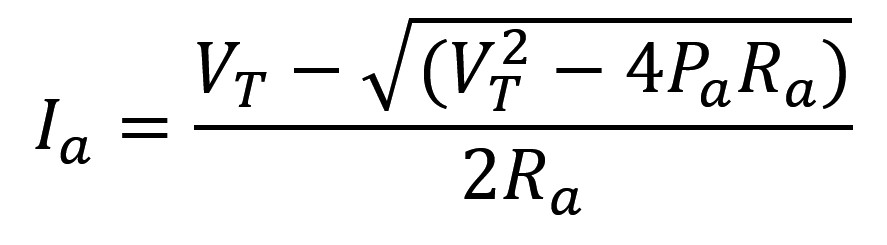
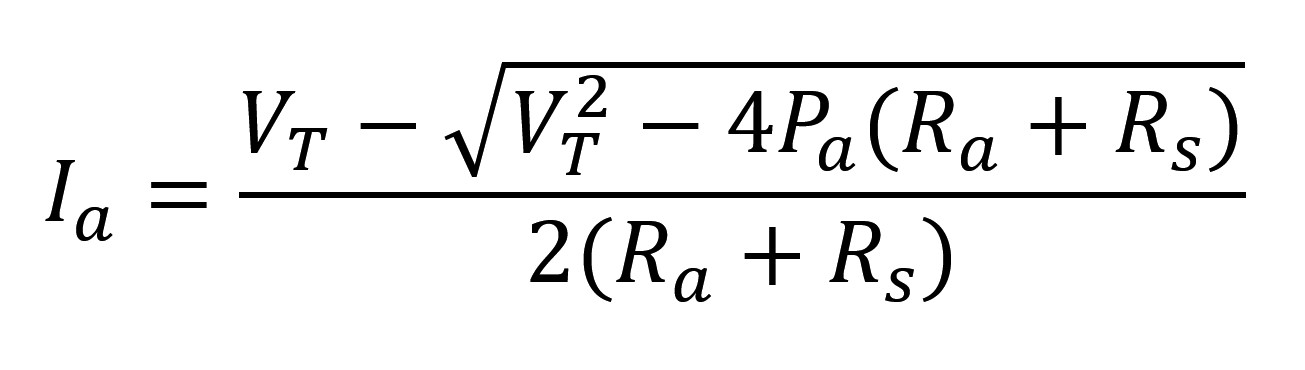
Elde edilir. Belirli terminal geriliminde ve makine parametrelerinde endüvide üretilen güç endüvi akımı ile ikinci dereceden bir parabolik olarak değişir. Verilen Pa gücüne göre yukarıdaki denklemin iki çözümü vardır. Yukarıdaki denklem yeniden düzenlenerek;
Haline getirilir. Ia’nın çözümü için;
Denklemi elde edilir. Bu denklemde Pa’nın sadece bir değerinde Ia’nın bir çözümü vardır. Bu şartlar karekök içindeki terimlerin sıfır olmasını gerektirir.
Bunun sonucunda motor tarafından sağlanabilecek en yüksek güç;
Olur ve bu güce karşılık endüvi akımı;
Olarak bulunur. Bu denklemin doğruluğunu hesaplamak için denkleminin Ia akımına göre türevi alınıp, sıfıra eşitlenirse;
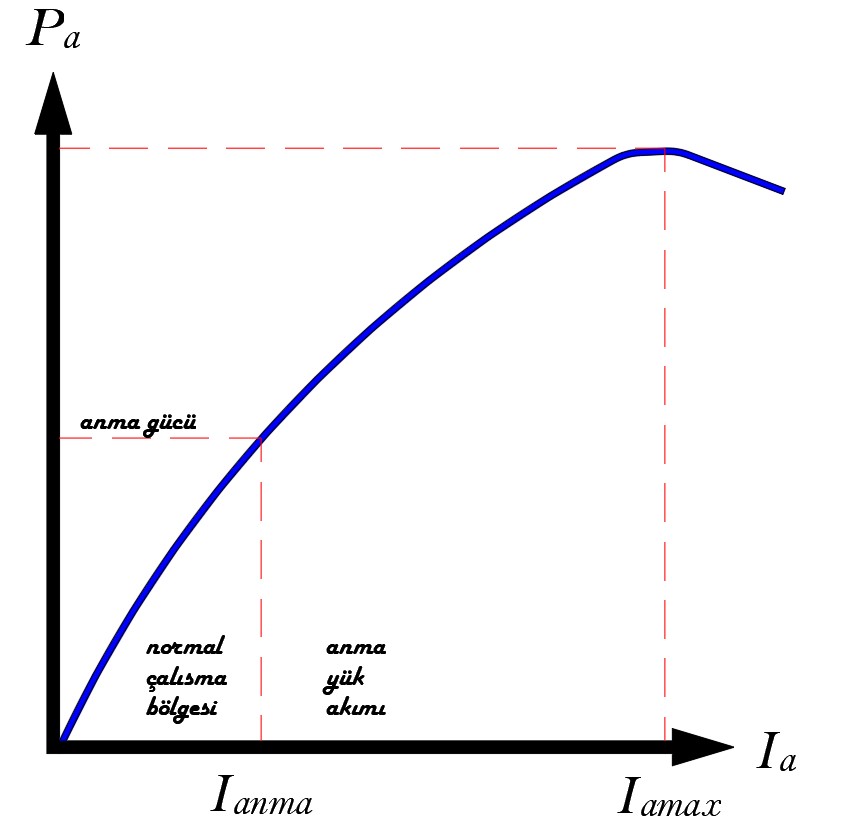
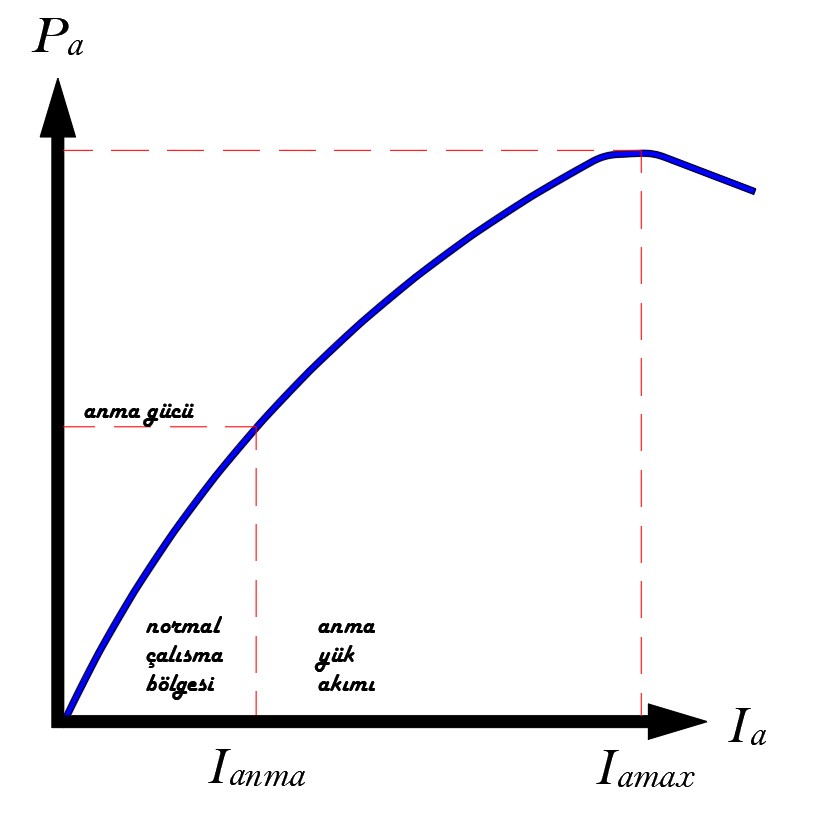
Elde edilen sonuç Iamax denklemini verir. DC motorun çalışma aralığı maksimum endüvi gücünden oldukça aşağıdadır. Motorun normal çalışma bölgesinde Ia denklemindeki karekök işareti negatif alınır.
DA seri motor endüvisinde üretilen gücün endüvi akımı ile değişimi
Pa denklemindeki endüvi ve seri alan dirençleri ihmal edilirse, Ia akımının yaklaşık bir değeri;
Olarak hesaplanır. Bu basit ve kullanışlı akım denklemi çok karışık olan bir önceki Ia denkleminden daha düşük bir akım değeri verir. Fakat düşük Pa güçlerinde akım hatası çok azdır. DA seri motorun endüvi akımı ile değişimi yukarıdaki grafikte çizilmiştir.
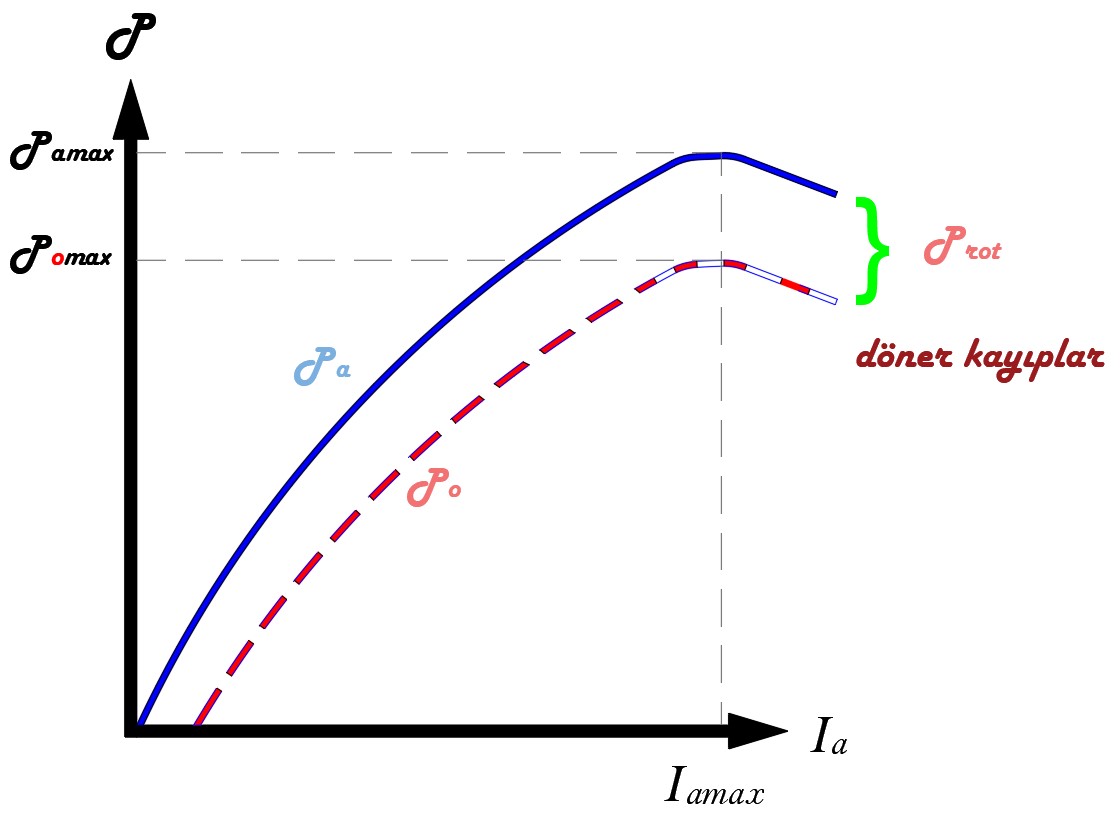
Motorun çıkış veya mil gücü endüvide üretilen güçten döner kayıpların çıkarılması ile elde edilir ve aşağıdaki grafikte gösteildiği gibidir.
DA seri motorun endüvi akımı ile çıkış ve endüvi gücünün değişimleri
ÖRNEK SORU:
10HP, 125V DC seri motorun endüvi direnci ile seri alan direnci toplamı 0.2Ω’dur. Prot=0 kabul edilirse;
a) Tam yükteki endüvi akımını,
b) Maksimum endüvi gücü ve karşılığı olan endüvi akımını,
c) Yarı yükteki endüvi akımını hesaplayınız.
ÇÖZÜM:
a) Tam yükte, döner kayıplar ihmal edilirse, endüvide üretilen güç ve endüvi akımı
Eğer denklemdeki karekök işareti pozitif alınsaydı, ikinci çözümde Ia=558A olurdu. Yaklaşık akım denklemindeki çözümde ise Ia=59,7A olarak 7 amperlik akım hesaplanır.
b) Maksimum endüvi gücü içinakım;
Bu akım değerine göremaksimum endüvi gücü;
c) Yarı yükte;
Bu güç değerine karşılık endüvi akımı;
Yaklaşık akım denkleminden yaklaşık akım değeri ise;
Olarak bulunur. İki farklı hesaplamadan elde edilen akımlar arasındaki fark veya hata 31,4-29,8=1,56A olarak bulunur.
ENDÜVİ MOMENT-HIZ KARAKTERİSTİĞİ
Endüvide üretilen moment (iç moment);
Ve böylelikle aynı zamanda;
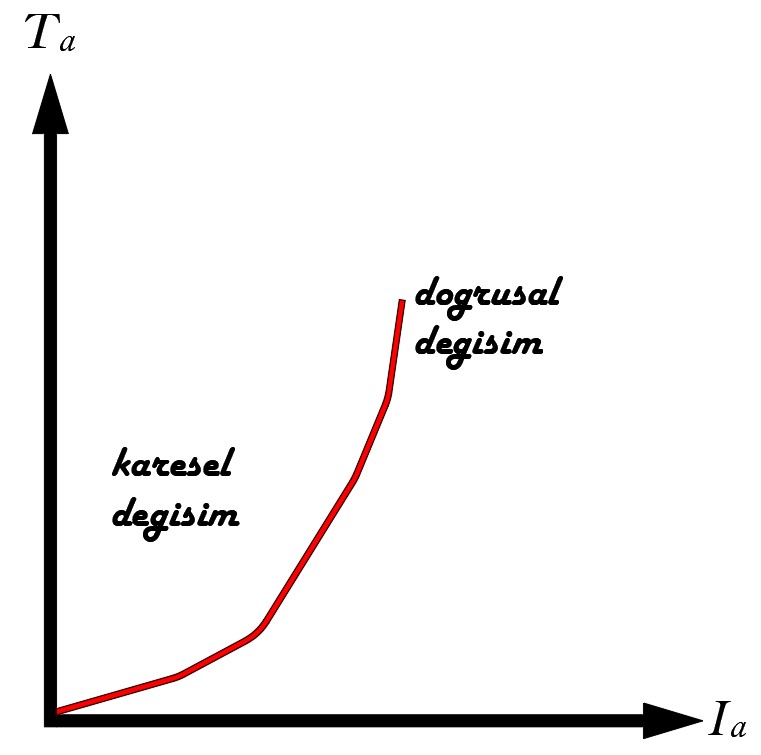
Şeklinde de ifade edilebilir. Aşağıdaki grafikte görüldüğü gibi nüvenin doymadığı bölgede moment endüvi akımının karesi ile değişirken doyum bölgesinde ise moment akımla doğrusal olarak artar.
Son olarak ise VT ile ilgili;
DA seri motor endüvi momenti-akımı ilişkisi
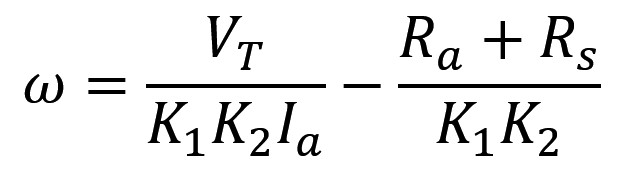
Endüvi akımı terimleri ile açısal hız;
Olarak ifade edilebilir. Yukarıdaki denklemden, endüvi akımının küçük bir değerinde bile motorun çok yüksek devir yapabildiğini gösterir. Bu sebepten motor yüksüz iken çalıştırılırsa motor devir sayısı çok aşırı yükselir ve tehlikeli durumlar meydana gelebilir. Bu sakıncaya meydan vermemek için DC seri motorlar hep motor miline yükün bağlı olduğu uygulamalarda kullanılır. Örnek olarak yük asansörü, vinç, tren motorları verilebilir. Motor hızının tehlikeli olacak devirlere yükselmesini önlemek için motor devresinde merkezkaç anahtar kullanılmalıdır.
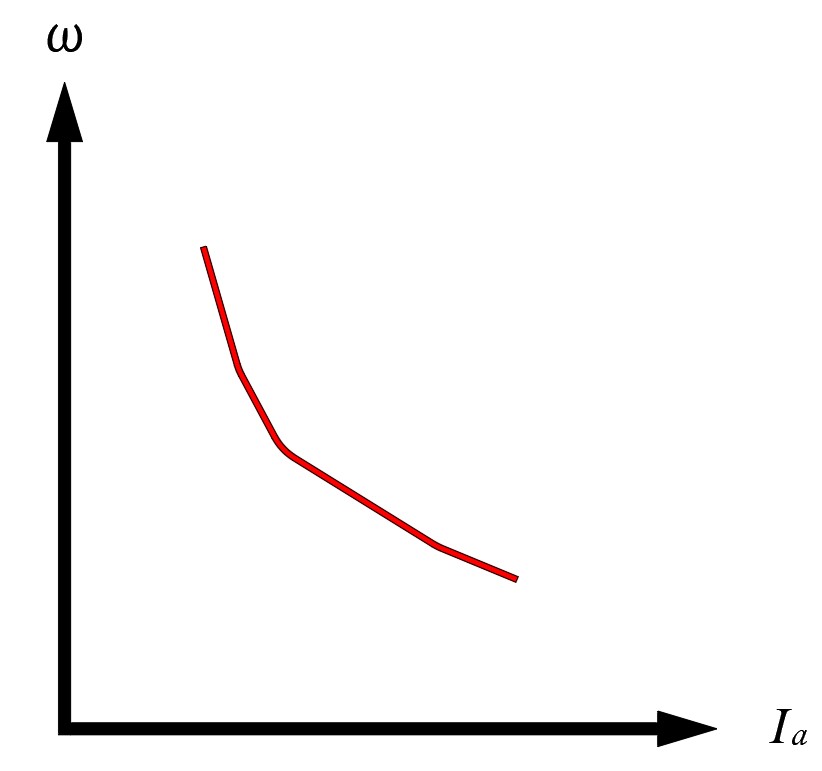
DC seri motorun endüvi akımı ile devir sayısının değişimi
DC seri motorun endüvi akımı-hız ilişkisi yukarıdaki grafikte gösterilmiştir. Yukarıdaki denklemle birlikte endüvi akımı, açısal hız ile tanımlanabilir. (Yukarıdaki denklemden endüvi akımını çekiyoruz.)
Elde ettiğimiz bu denklem yukarıdaki VT denkleminde yerine konulursa;
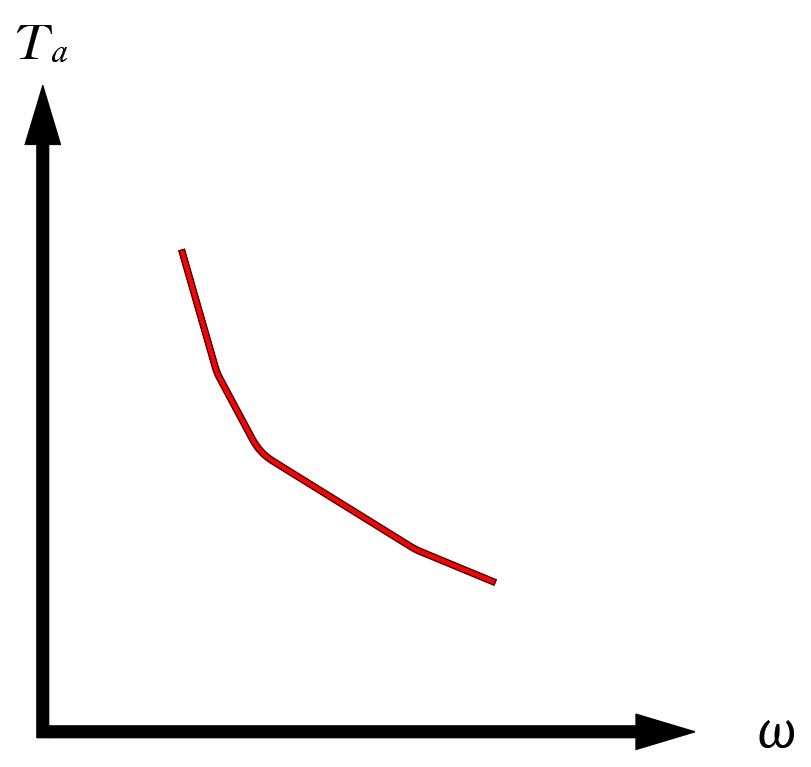
Elde ettiğimiz denklem, DC seri motorun moment-hız karakteristiğini verir ve aşağıdaki grafikte seri motorun moment hız eğrisi gösterilmiştir.
Seri motorun moment-hız eğrisi
ÖRNEK SORU:
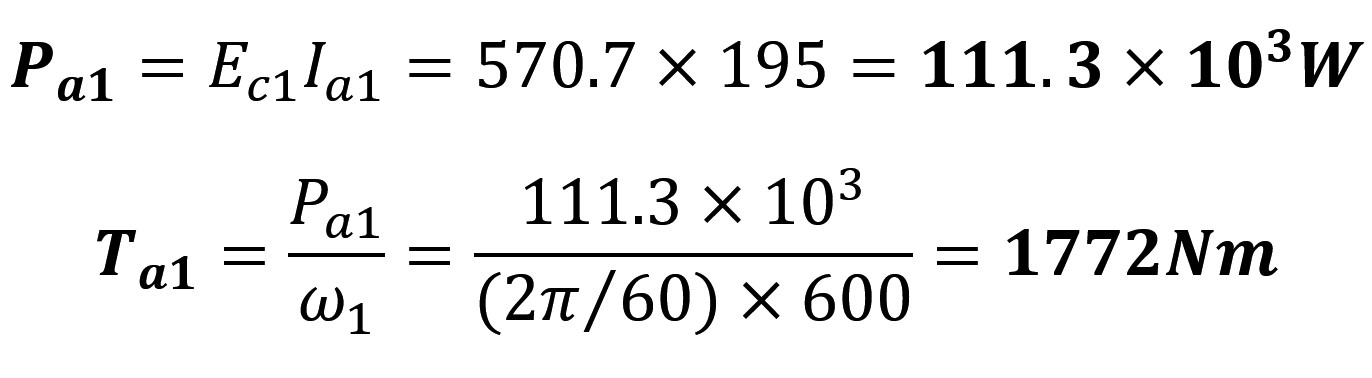
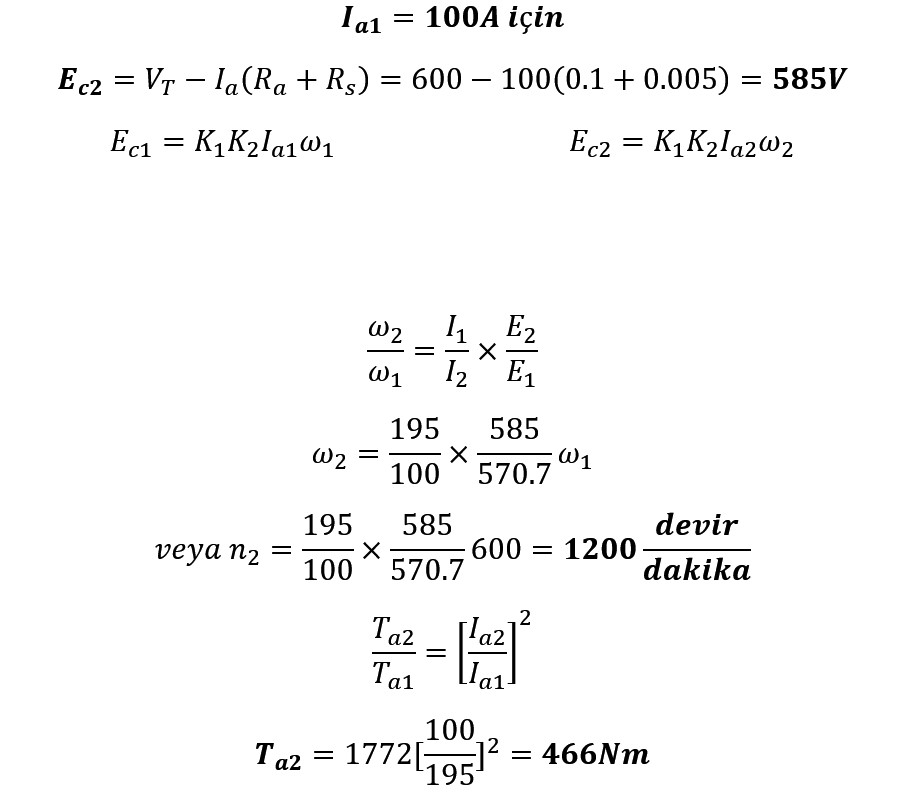
600V, DA seri motor 600 d/d ve anma yükünde çalışır Endüvi direnci 0.1Ω ve seri alan sargısı direnci 0.05Ω’dur. Tam yükte motor 195A akım çeker.
a) Tam yükteki zıt emk değerini
b) Tam yük altında endüvide üretilen gücü ve iç momenti
c) Yük değiştirilerek hat akımı 100A yapılırsa oluşacak hız ve endüvi momentini hesaplayınız.
ÇÖZÜM:
a)
b)
c)
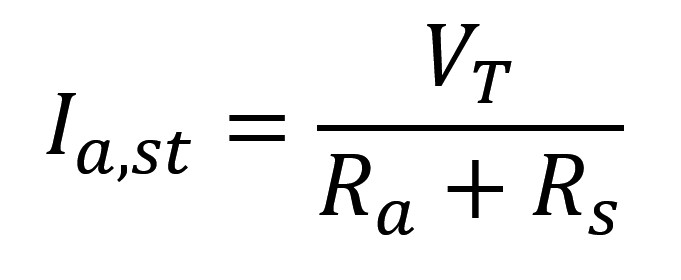
YOLALMA (BAŞLAMA) AKIMI
Motor dururken, motor devir sayısınınve zıt emk’in sıfır olduğu açıktır. Endüvi devresine sabit kaynak geriliminin uygulanması çok yüksek akım ile sonuçlanacaktır. Ia’nın denkleminde Ec=0 iken başlama akımı;
Olur. Başlama akımını sınırlamak için iki tedbir alınabilir. Birincisi ve en gerçekçi olanı motora ayarlı DA gerilim kaynağından azaltılmış gerilim uygulamaktır.
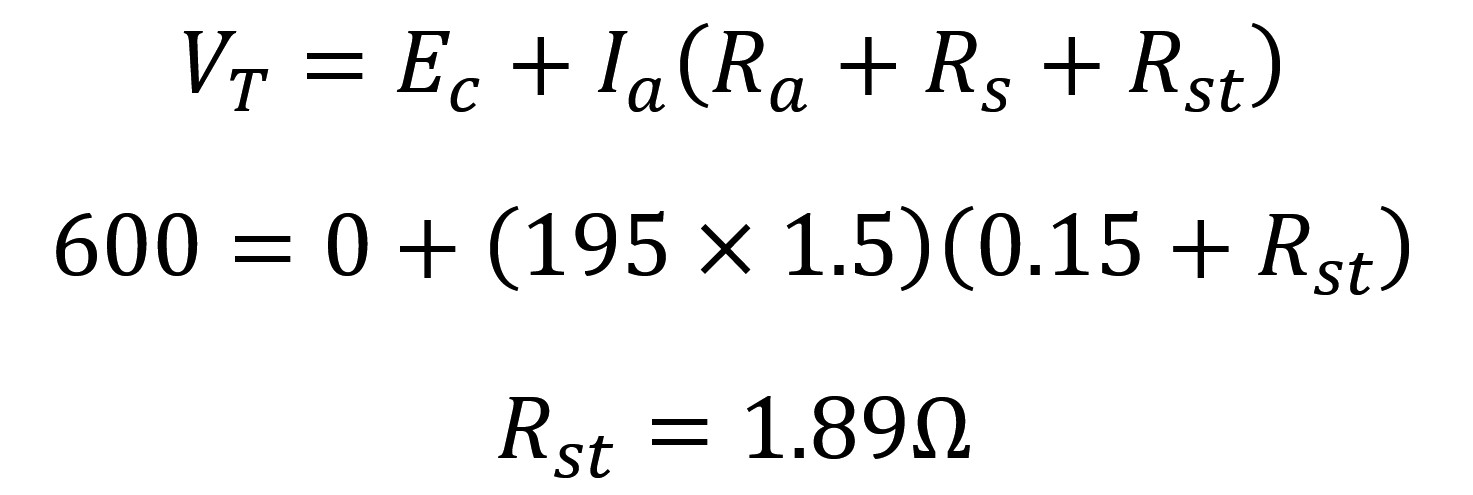
İkincisi ve klasik olanı ise akım değerini kabul edilebilir sınırda tutacak yolverme (starting) direnci (Rst) kullanmaktır. Bu direnç ayarlı olup motor devir sayısı arttıkça devreden çıkarılarak sıfır yapılır. Motor, yol aldıktan sonra eğer motor direnci devrede bırakılırsa düşük devir (performans) ile çalışacaktır.
Seri motor yüksek yolalma karakteristiğine sahiptir. Motorun yolalma, yolverme, başlama, start akımı birbirinin aynısı terimlerdir. İsim değişiklikleri sizi aldatmasın.
ÖRNEK SORU:
Bir önceki örnekteki DC seri motor yolalma akımını anma değerinin %150 oranında sınırlamak için gerekli Rst direncini hesaplayınız.
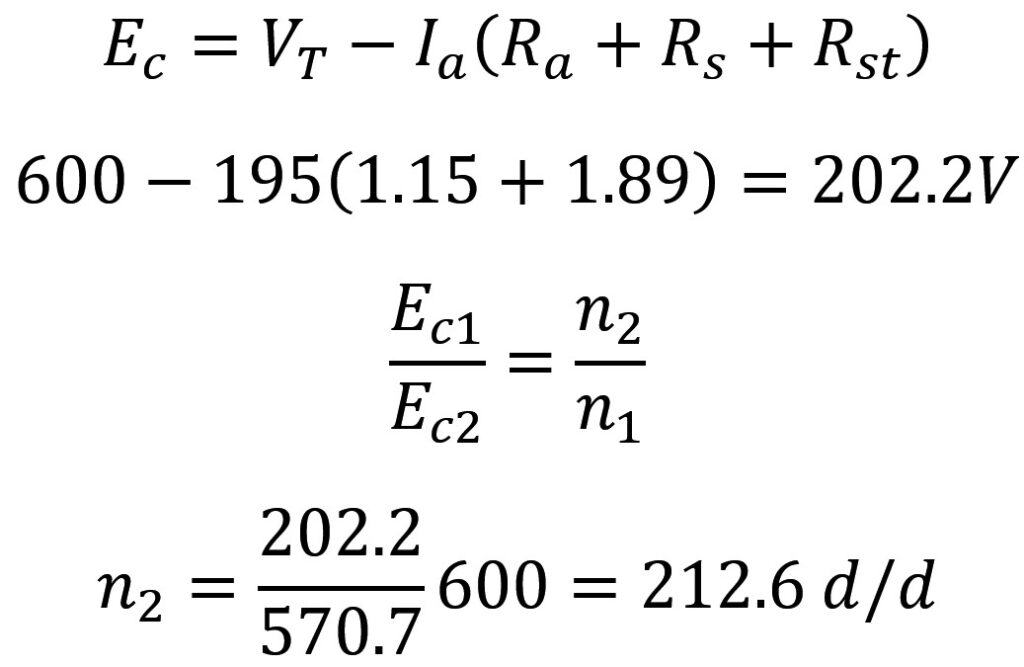
Eğer yolverme direnci devrede bırakılırsa endüvi akımı 195A olan anma değerine düşer. Endüvi zıt emk’i ve motor devir sayısını bulunuz.
ÇÖZÜM:
Başlangıçta Ec=0 iken;
Önceki örnekten Ia=195A için Ta=1772Nm 292.5A yolalma akımı için yolalma momenti;
Yolverme direnci devrede bırakılırsa;
Anma yükünde ve geriliminde n1=600d/d hız ile dönen motorun yol verme direnci devreden çıkarılamaz ise devir sayısı n2=212.6d/d’ ya düşmektedir.
Doğru akım (DA veya direct current DC) motor DC elektrik enerjisini mekanik enerjiye çevirir. DC motorlar DC generatör olarak da çalışabilirler. Çünkü yapıları aynıdır. Bu yüzden DC generatör için uygulanan modeller motor için de uygulanabilir. Model dikkate alındığında farklılık temel endüvi gerilimindedir. Generatör durumunda endüvinin ürettiği endüklenen gerilim (Eg), motor durumunda endüvide meydana gelen zıt emk (Ec) olarak adlandırılır.
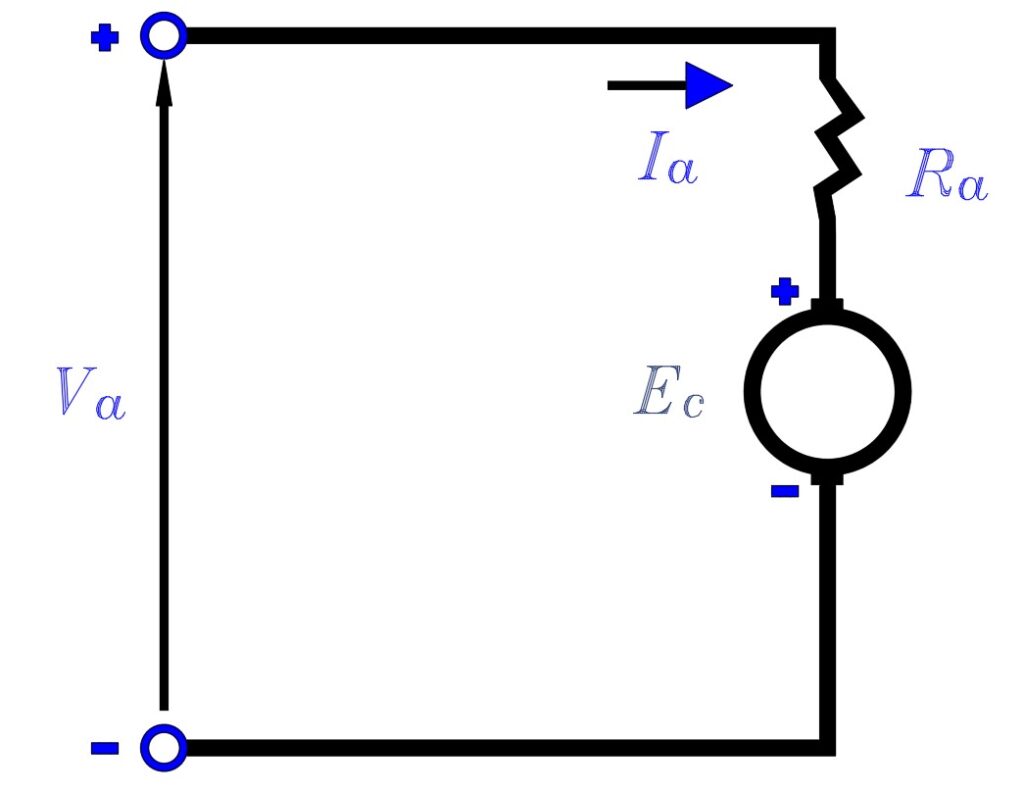
ENDÜVİ DEVRESİ MODELİ
DC Motorun Endüvi Devresi Modeli
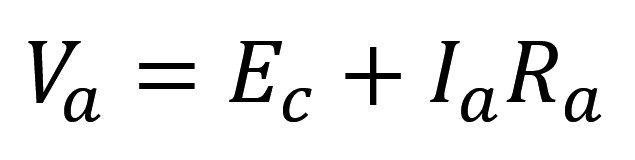
DC motorun endüvi devresi yukarıdaki model ile temsil edilir. Endüviye uygulanan gerilim (Va), zıt emk (Ec), endüvi sargısı direnci (Ra) ile temsil edilir.
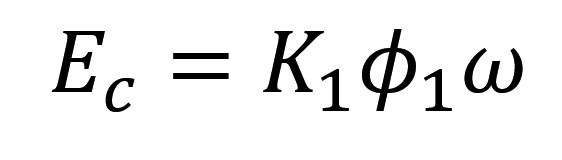
Kullanılarak endüvi akımı hesaplanır. Zıt emk; alan akısı ve endüvi açısal hızı ω veya devir sayısı n ile değişir.
K1 sabiti; endüvideki iletken sayısı, kutup sayısı gibi makine parametlerine bağlıdır.
Motor dururken, motor devir sayısının ω=0 ve böylece yol alma başlangıcında motor zıt emk’nın Ec=0 olduğu görülür.
Eğer Va geriliminin azaltılmış bir değeri endüviye uygulanmazsa yolalma başlangıcında endüvi akımı çok yüksek olacaktır. Bu duruma özel bir önem verilmeli ve dikkat edilmelidir.
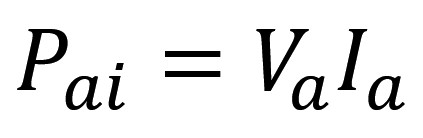
Endüvi devresine giren güç;
Endüvi güç kayıplarını ve endüvi gücünü karşılar.
Endüvide üretilen güç Pa ;
Net çıkış gücü (Po) ise endüvi gücünden döner kayıpların (Prot) çıkarılması sonucu elde edilir.
Net çıkış gücü motor milinden elde edilen güçtür. Newton-metre olarak net çıkış momenti;
Denkleminden hesaplanır. Burada ω açısal hızdır ve birimi rad/s’ dir.
ÖRNEK:
Endüvisine 220 volt uygulanan bir DA seri motorda tam yük endüvi akımı Ia=200A’dir. Endüvi direnci 0.2Ω’dur. Zıt emk’i, net çıkış gcünü ve 1750 d/d tam yük devrindeki döner kayıpları 1420W kabul ederek çıkış momentini hesaplayınız.
ÇÖZÜM:
Va=220VIa=200A
Zıt emk;
Ec= Va-IaRa=220-200(0.2)=180V
Endüvide üretilen güç;
Pa=EcIa=36000W=36kW
Net çıkış gücü endüvi gücünden döner kayıplar çıkarılarak elde edilir.
Po=Pa-Prot=36000-1420=34580W
Net çıkış momenti;
To=Po/ω=34580W/[(2π/60)1750]=188.7Nm
UYARTIM DEVRESİ MODELİ
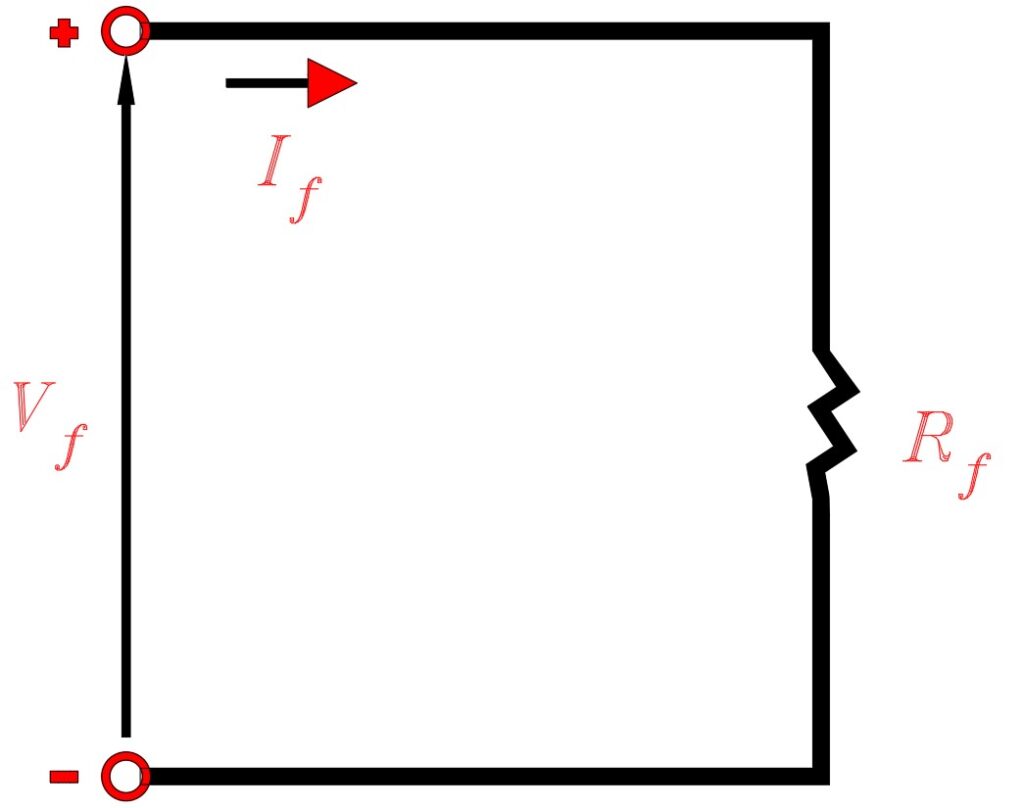
DC motorun tam bir performans analizini yapabilmek için uyartım devresinin endüvi devresine bağlantı şeklinin bilinmesi gerekir. Aşağıdaki modelde gösterildiği gibi uyartım devresi bir DC kaynağı (Vf)
Ve alan sargısını temsil eden bir direnç (Rf) ile modellenir.
DC Motorun Uyartım Devresi Modeli
Yukardaki modelde verilen zıt emk uyartım akısına bağlıdır. Elektrik makinelerinde kullanılan manyetik malzemelerin mıknatıslama karakteristiği DC makinelerin uyartım kutupları için de geçerlidir. Kutupların hem doğrusal hem de doyum bölgeleri vardır. Ancak alan akısının uyartım akımı ile orantılı olarak değiştiğini kabul etmek yaygın bir uygulamadır.
Burada If uyartım akımı, фf ise kutup akısıdır.. Zıt elektromotor kuvveti (emk) ise
Olarak tanımlanır.
DC seri motordaalan sargısıendüvi sargısına seri olarak bağlanır. Şönt motorda ise alan sargısı endüvi sargısına paralel bağlanır. Bu iki bağlantının kombinasyonundan DC kompunt motor elde edilir.
Doğru akım (DA veya DC) jeneratörlerde geçmişte kullanıldığı gibi çok yaygın olarak kullanılmamalarına rağmen çalışma prensipleri DA motorların ve diğer döner motorların anlaşılmasına yardımcı olacaktır.
Piyasadaki doğru akım generatörleri ve motorları aynı şekilde üretilirler. Bunun sonucu herhangi bir generatör motor olarak çalışabildiği gibi herhangi bir motorda DA generatörü olarak çalışabilir. Benzer yapıları dolayısıyla generatör ve motorların özellikleri de benzerdir. Generatör hakkında öğrenilen bilgiler motorlara da doğrudan uygulanabilir. Bu bölümde DA generatörlerin çalışma esasları hakkında bilgi verilecektir.
AA GERİLİMİN ÜRETİMİ
DA Generatör dersine alternatif akım (AA veya AC) hakkında bilgi vermekle başlamak konuyla ilgili değilmiş gibi görünebilir. Fakat, her DA generatör içinde üretilen gerilim alternatif akım şeklindedir. Bu gerilim doğrultulduktan sonra dışarıya DA gerilim olarak aktarılır.
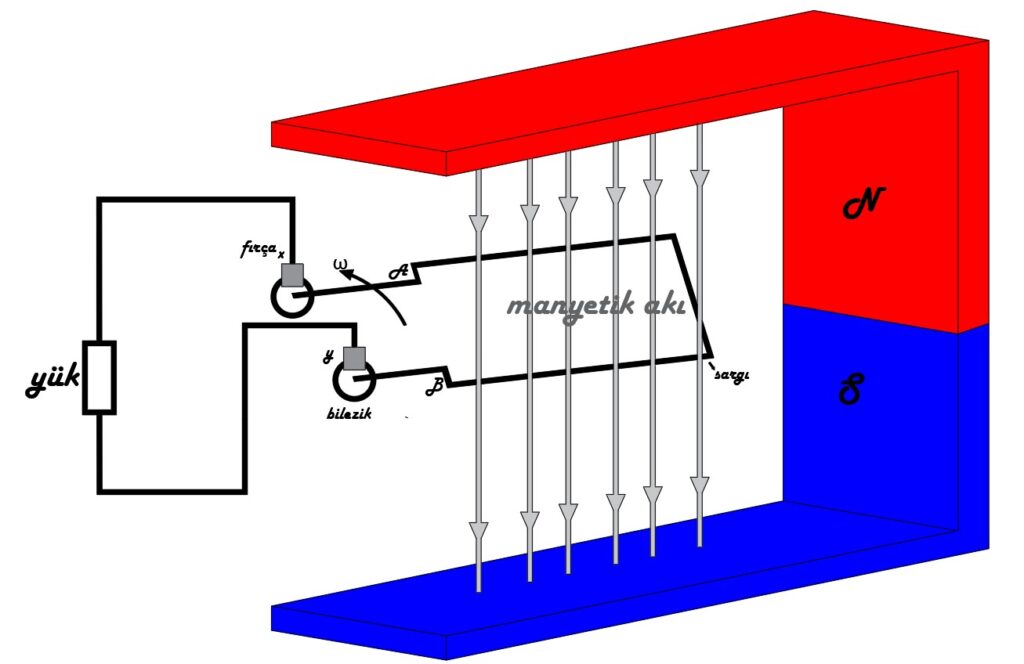
Basit bir AA generatörü
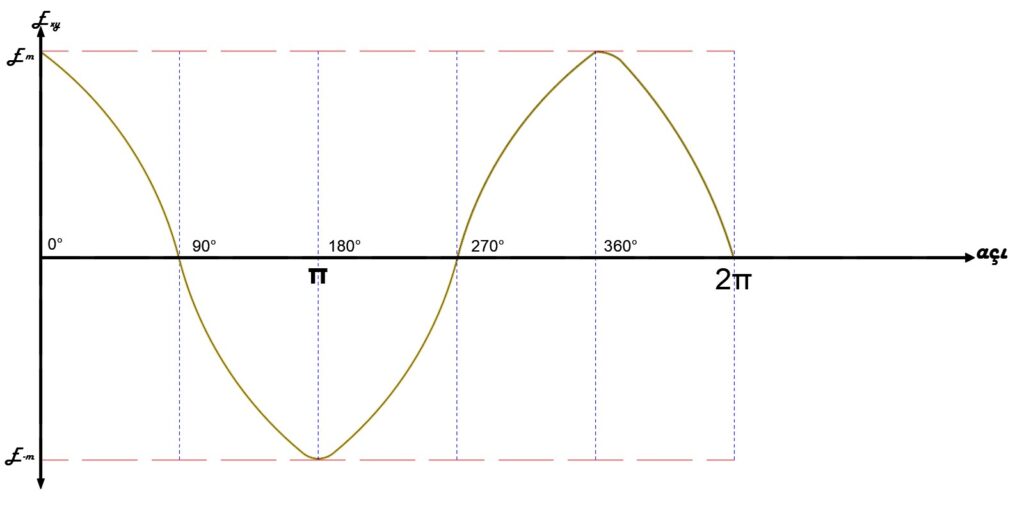
Sargı dönme açısının bir fonksiyonu olarak AA generatörde üretilen gerilim
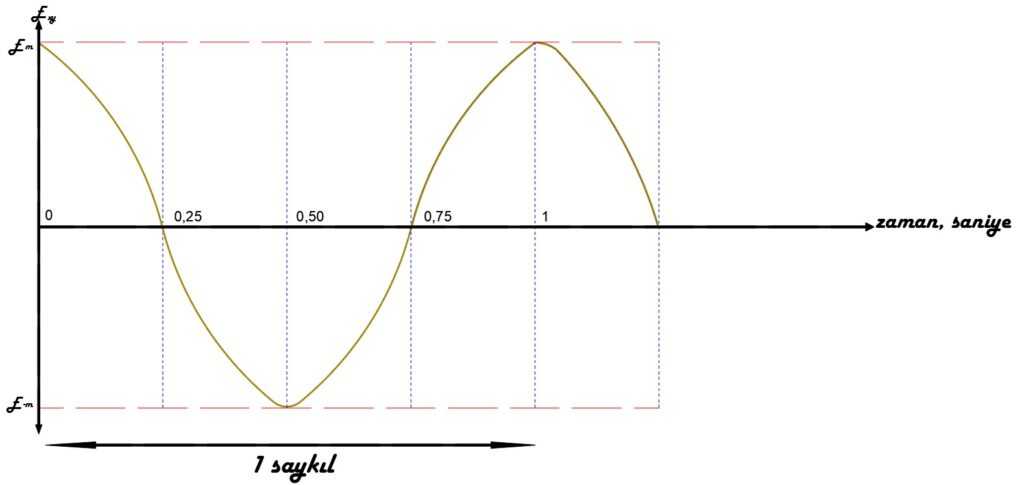
Zamanın bir fonksiyonu olarak endüklenen sargı geriliminin değişimi
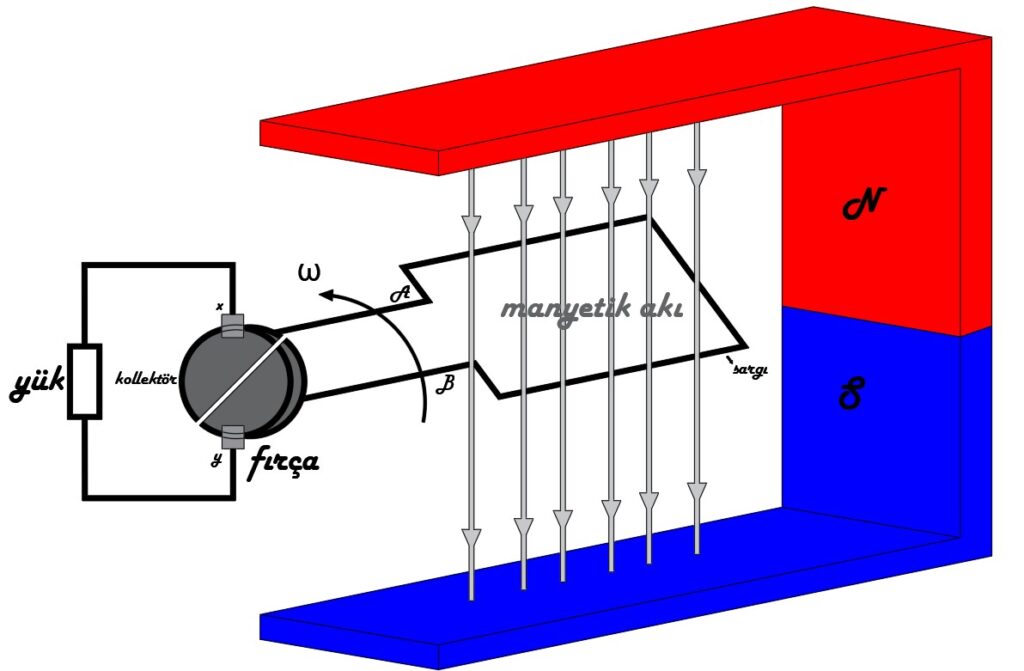
Yukarıdaki şekilde N-S kalıcı mıknatısları arasında 60 d/d hızla dönen bir sargıdan meydana gelen bir temel AA generatör gösterilmiştir. Döndürme işlemi harici bir kuvvet (motor) ile gerçekleştirilir. Fakat, motor şekilde gösterilmemiştir. Sargı uçları kayarak temas ettikleri iki bileziğe bağlanmışlardır. Bilezikler ise sabit durumdaki (x,y) fırçaları vasıtasıyla dışarıdaki yüke bağlıdırlar. Sargı dönerken manyetik akı çizgilerini keser ve A-B uçlarında bir gerilim endüklenir. Bu gerilim bilezikler ve fırçalar vasıtasıyla dışarıya alınır ve yüke uygulanır.Örneğin yukarıdaki şekildeki sargı konumunda sargı kenarları N-S kutuplarının tam altındadır ve endüklenen gerilim maksimum değerini alır. Sargı 90° döndürüldüğünde sargı kenarları akı çizgilerini kesmez ve gerilim üretilmez. Sargının her yarım tur dönüşünde gerilimin polaritesi değişir. Böylece gerilim sağ üstteki resim gibi temsil edilebilir. Sargının her açıdaki dönüşü belirli bir zaman aldığı için üretilen gerilim zamanın bir fonksiyonu olarak sağ alttaki gibi çizilebilir.
DOĞRU AKIM GENERATÖRÜ
Bir DA generatörün basit olarak temsili
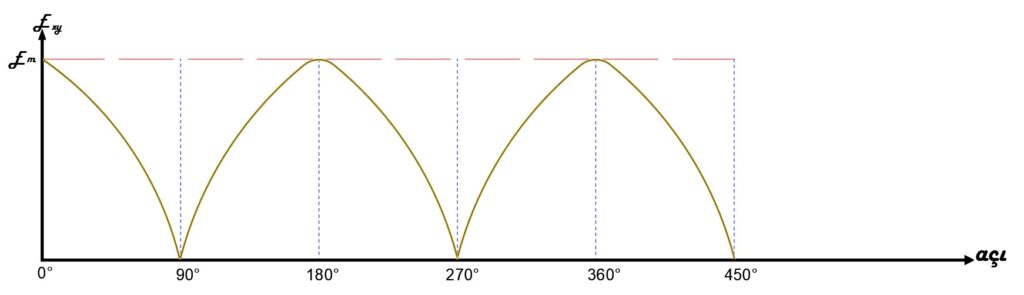
Sargı pozisyonunun bir fonksiyonu olarak üretilen gerilimin dalga şekli
Basit bir AA generatöründeki fırçalar polaritenin her değişiminde eğer bir kayar halkadan diğerine kaydırılabilseydi yük uçlarında sabit polariteli bir gerilim elde edilebilirdi. x fırçası her zaman pozitif, y ise negatif olurdu. Bu sonuç DA generatördeki elektrik üretimi resminde gösterildiği gibi kollektör kullanılarak elde edilebilir. Kollektör birbirinden yalıtılmış bakır dilimlerden oluşur. Bakır dilimler milden yalıtılmış olarak mil üzerine daire şeklinde yerleştirilirler. Sargının A ucu bir dilime B ucu diğer dilime bağlanır. Kollektör sargı ile beraber döner ve iki dilim arasındaki endüklenen gerilim sabitlenmiş fırçalar (x, y) vasıtasıyla dışarı alınır. Sargı pozisyonunun bir fonksiyonu olarak üretilen gerilimin dalga şeklinde gösterildiği gibi x ve y fırçaları uçlarındaki gerilim dalgalıdır, fakat polaritesi değişmez. Gerçekte ise endüklenen gerilim alternatif olarak değişmesine rağmen, mekanik ters çevirme anahtarı olarak çalışan kollektör tarafından doğrultularak dışarıya alınır.
Fırçaların uçlarında sabit bir polarite olmasından dolayı dış devredeki yük içinden hep aynı yönde akım geçer. Yukarıda gösterilen makine bir DA generatörünü veya dinamoyu temsil etmektedir. Temel AA ve DA generatörler arasındaki farklılıkendüvi sargısı uçlarının dış devreye bağlantı şeklinden kaynaklanmaktadır. AA generatörlerde bilezikler kullanılırken DA generatörlerde kollektör kullanılır. Bazen makinelerde hem bilezikler hem de kollektör kullanılır ve bu makine hem DA hem de AA generatörü olarak çalıştırılabilir.
EK BİLGİ
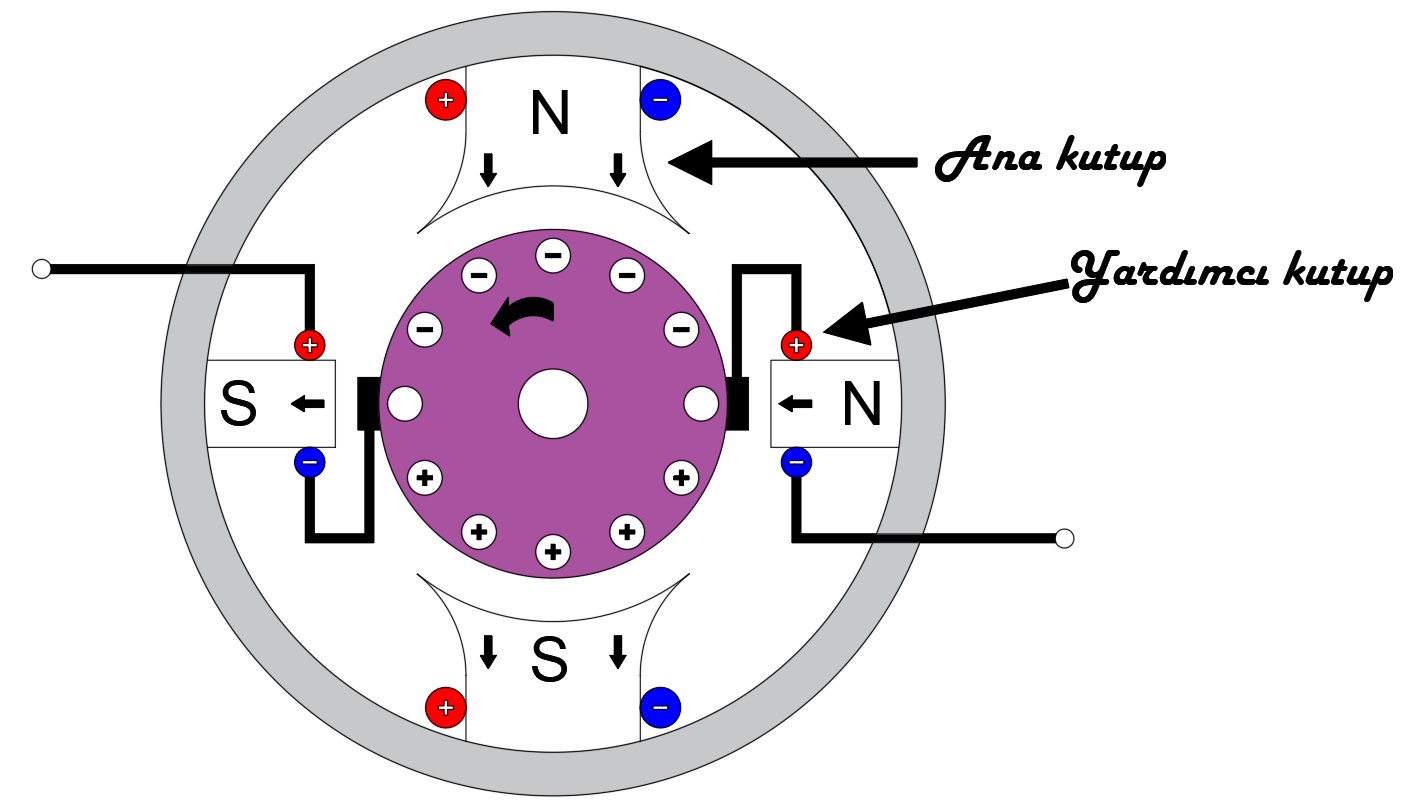
Endüviden geçen akım, manyetik alan oluşturur ve kutuplarda oluşan manyetik alanı bozar. Bu durumda endüvi reaksiyonu oluşur. Bu istenmeyen durumu ortadan kaldırmak için yardımcı kutup kullanılır. Bazı küçük güçlü motorlarda yardımcı kutup olmayabilir.
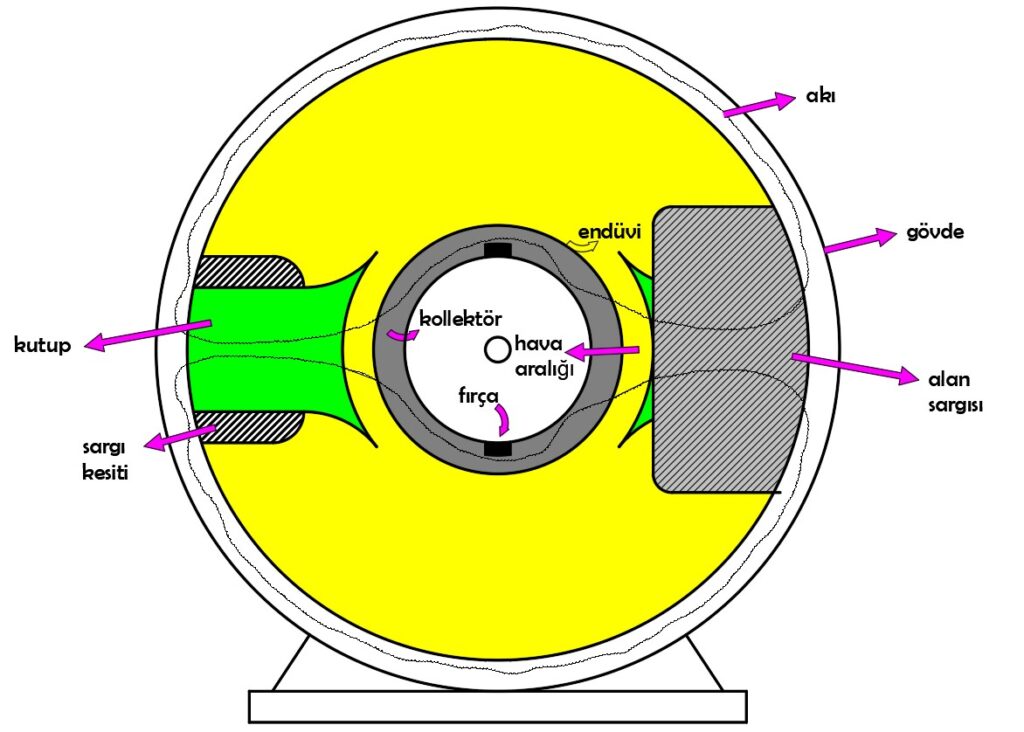
Doğru akım makinelerinin ana parçaları; uyartım (alan) kutbu, endüvi, kollektör ve fırçalardır. Aşağıdaki şekillerde doğru akım makinelerinin ana kısımları verilmiştir.
2 kutuplu makinenin ara kesiti ve elemanları.
UYARTIM (ALAN) KUTBU
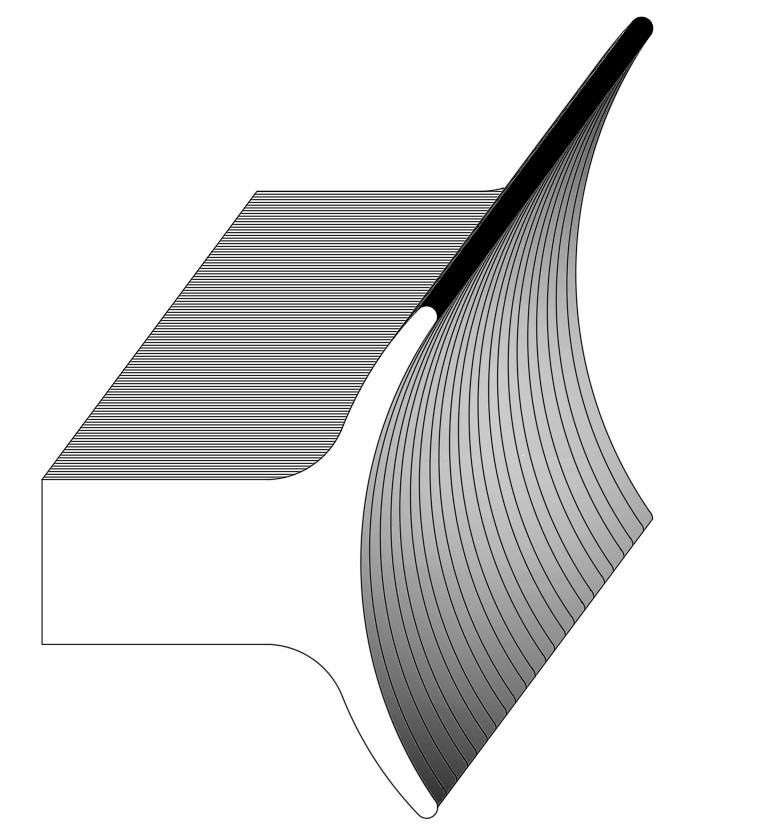
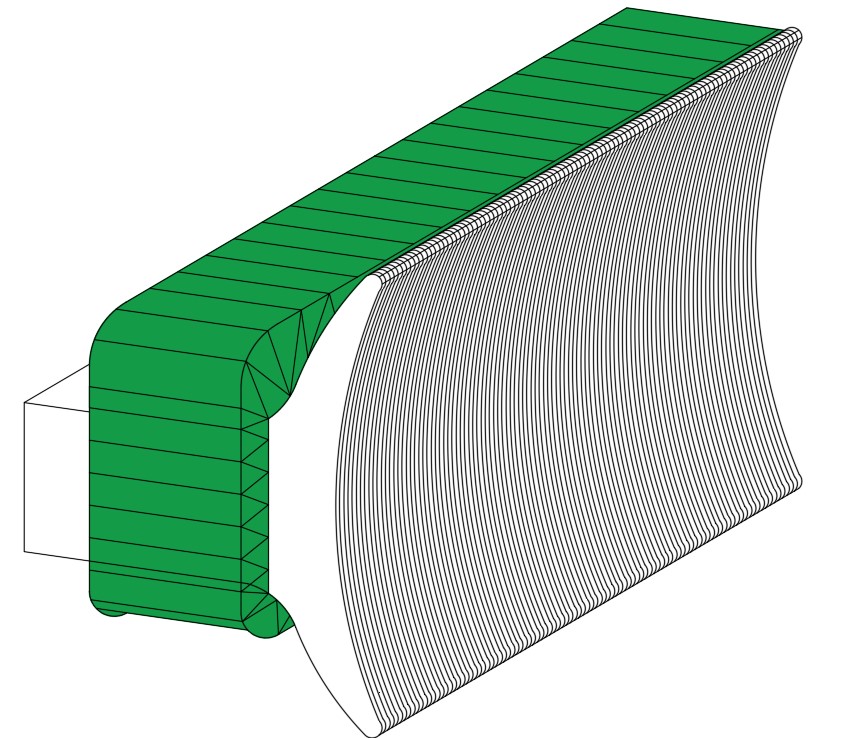
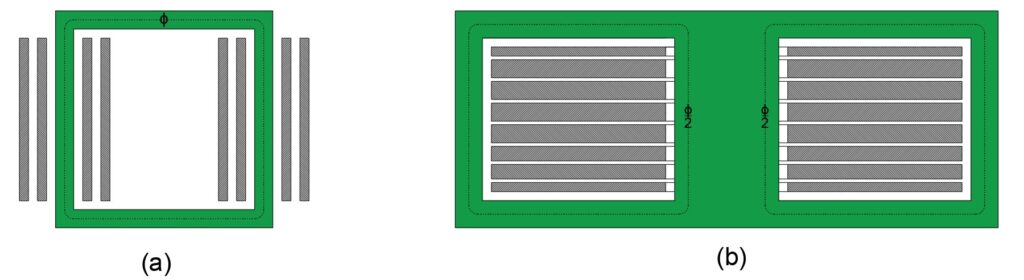
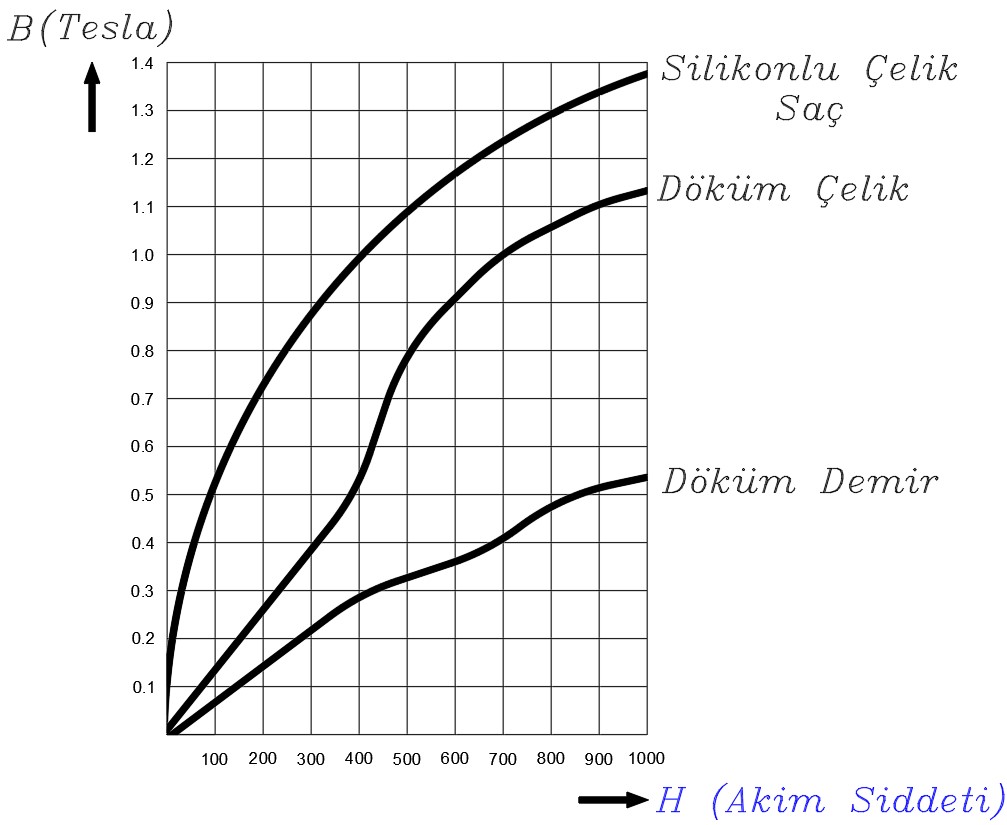
Alan kutbu, makine içinde ana manyetik akıyı üretir. Kutup sabit olarak makine dış gövdesinin iç kısmına yerleştirilmiş çıkıntılı kutuplu elektromıknatıstır. Alan sargıları kutuplar üzerine sarılır ve DC uyartım akımını taşırlar. Kabin (dış gövde) genellikle dökme çelikten yapılır. Kutupların nüvesi aşağıdaki (1) numaradaki şekildeki gibi demir saç levhalardan paketlenerek yapılır ve nüve üzerine (2) numaradaki şekil gibi uyartım sargıları sarılır. Bazı makinalarda manyetik akı sürekli mıknatıslar ile sağlanır.
Kutup Nüvesi
Sargılı Kutup Nüvesi
Pratikte generatör veya motor 2,4,6 gibi 24’e kadar varan kutuplara sahip olabilir. Kutup sayısı makine boyutuna bağlıdır. .Makine büyüdükçe kutup sayısı da artar. Çok kutuplu tasarım ile büyük makinelerin maliyeti ve boyutu azaltabilir, performansları iyileştirilebilir. Çok kutuplu alan sargıları, komşu kutuplar zıt polariteleri oluşturacak şekilde bağlanır. Şönt alan sargıları yüzlerce sarımdan yapılır ve düşük akım taşırlar. Sargılar kutuplardan yalıtılarak kısa devre olmaları önlenir. Sargıların ürettiği mmk bir manyetik alan üretir. Manyetik alan kutupları, dış gövdeyi, endüviyi ve hava aralığını keser. Hava aralığı kutuplar ile endüvi arasındaki çok kısa bir boşluktur.
Çok kutuplu makinenin manyetik polaritesi
Makine büyüklüğü arttıkça (1kW’dan 10kW’a) hava aralığı da 1,5mm’den 5mm’ye kadar artar.Endüvi ve kutup nüveleri manyetik geçirgenlikleri yüksek iyi malzemelerden yapıldıkları için toplam mmk’in çoğu, akıyı hava aralığından geçirmede kullanılır. Eğer hava aralığı azaltılırsa şönt sargı boyutları azaltılabilir. Fakat hava aralığı çok daha kısa yapılamaz. Eğer yapılırsa, endüvi reaksiyonu etkisi çok daha büyük olur. Makine seri alan sargılarına sahip ise, seri sargılar şönt alan sargıları üzerine sarılır. Endüvi devresine seri bağlanan seri alan sargısı makinenin tam yük akımını taşıyacak kesitte olmalıdır.
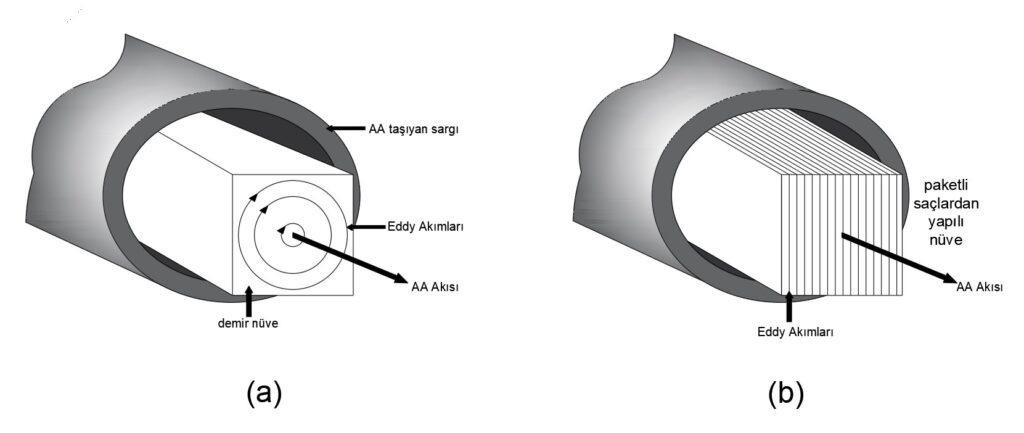
ENDÜVİ
Doğru akım makinesinin dönen kısmına endüvi denir. Endüvi; kollektör, demir nüve ve sargılardan oluşur. Aşağıdaki şekilde gösterildiği gibi endüvi bir mil (şaft) üzerine geçirilir ve alan kutupları arasında döner. Demir nüve demir saç levhaların paketlenerek silindirik hale getirilmesi ve üzerine oyuklar açılması ile elde edilir. Saç levhalar arası ince bir yalıtkan film tabakası ile yalıtılarak birbiri arasındaki elektriksel temas önlenir. Bunun sonucu eddy akımı kayıpları azaltılır. Endüvi iletkenleri ise makinenin ürettiği yük akımını taşırlar ve demir nüve oyuklarına yerleştirilirler. İletkenler nüveden kağıt, mika gibi yalıtkanlarla yalıtılırlar. Eğer endüvi akımı 10A’in altında ise yuvarlak iletkenler, 20A’i geçiyorsa dikdörtgen kesitli iletkenler tercih edilir. Bunun nedeni, dikdörtgen iletkenler kullanıldığında oyukların hacminden daha iyi faydalanılmasıdır.
DA makineleri için boş endüvi şekli
DA makineleri için dolu endüvi şekli
KOLLEKTÖR VE FIRÇALAR
Kollektör aşağıdaki şekildeki gibi bakır dilimlerden meydana gelir. Dilimler arası mika ile yalıtılır ve mika mili üzerine monte edilir. Endüvi iletkenleri kollektöre bağlanırken büyük özen gösterilmelidir
DA Makine Kollektörü Bordo ile gösterilen bölüm bakır malzemeden yapılmış, mika ile kaplanmış, mil üzerine monte edilmiş kollektör dilimlerini ifade etmektedir.
2 ve 4 kutuplu kollektör için fırçaların yerleşimi
Endüvide herhangi bir simetri veya balans bozukluğu kollektör ve fırçalar arasında kabul edilemez kıvılcamlara (arklara) neden olur. Kıvılcımlar fırçaları yakar ve kollektörü karbonlaştırır. İki kutuplu makinede kutuplar dairesel olarak birbiriyle karşı karşıya getirilir. Fırçalar kollektör üzerine kayarak temas ederler ve yük ile endüvi arasındaki elektrik bağlantısını sağlarlar. Aşağıdaki şekilde gösterilen fırçalar karbondan yapılır. Çünkü karbon iyi elektrik geçirgenliğine sahiptir ve yumuşaktır. Kollektör üzerinde bozulmalara neden olmaz. İletkenliği arttırmak için bazen karbon içine biraz bakır karıştırılır. Fırçaların baskısı yaylar ile ayarlanır. Eğer fırça baskısı çok büyük ise kollektör ve fırçalar arasındaki sürtünme aşırı ısınmaya neden olur. Diğer taraftan eğer fırçaların baskısı çok zayıf ise iyi olmayan bir temas sağlanır ve ark üretilir.
Mavi renk ile gösterilen bölümde karbon malzemeden yapılmış fırçayı ve mesafesini ayarlamak için kullanılan yayı görmektesiniz.
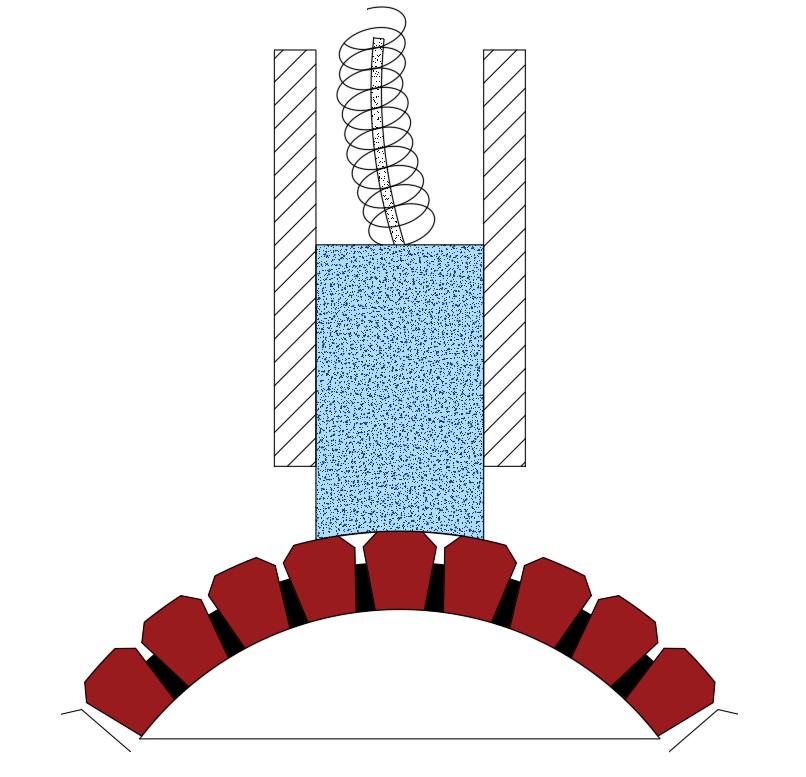
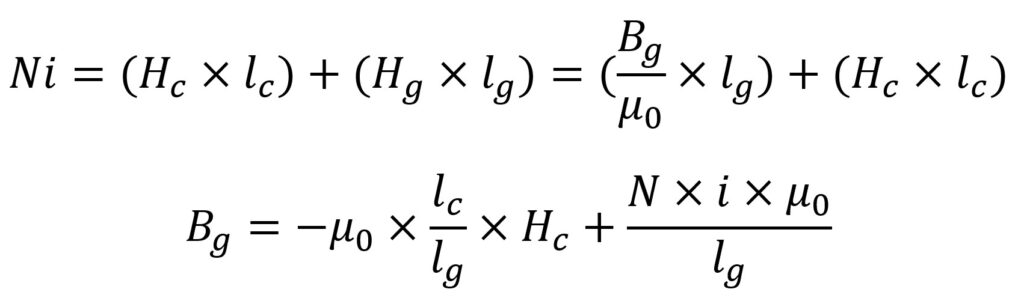
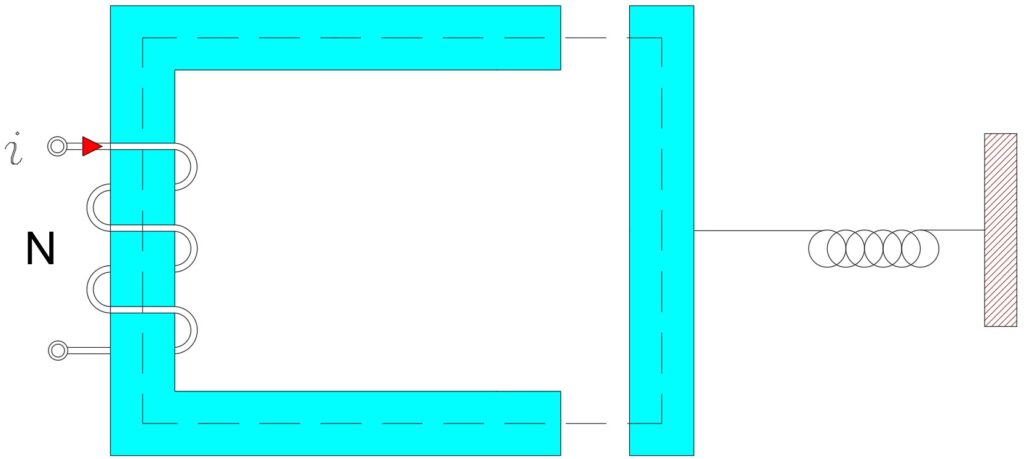
Bir iletkene doğru akım uygulandığı zaman iletken, sabit manyetik alan meydana getirir. Bu manyetik alan N ve S kutuplarını meydana getirir ve kutuplar arası kuvvetli bir manyetik akı oluşur. Rotorda meydana gelen sabit manyetik alanın itme ve çekmesiyle dönme oluşur
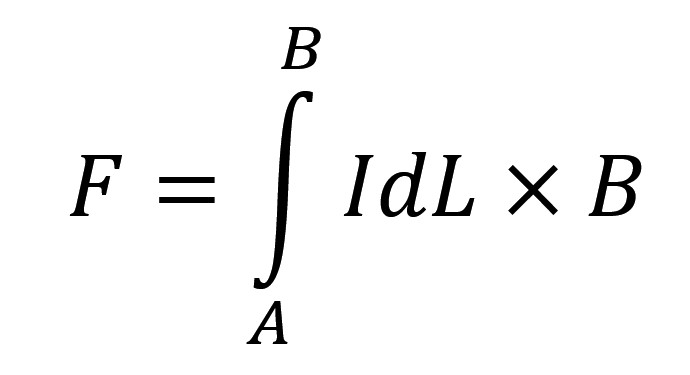
Manyetik alanda bulunan ve üzerinden I akımı geçen bir tele manyetik alan tarafından bir kuvvet etki eder. Telin A ve B gibi iki noktası arasında kalan kısma etkiyen manyetik kuvvet;
Olacaktır. Telin, L uzunluklu doğrusal bir tel olması ve B manyetik alanının düzgün olması durumunda bu telin tamamına etkiyen kuvvet, F=Il*B olur.
Tele etkiyen manyetik kuvvet sağ el kuralı ile bulunur. Bu kurala göre sağ el işaret parmağı aşağıdaki şekilde görüldüğü gibi manyetik alan yönünü ve başparmak akım yönünü gösterdiğinde orta parmak da kuvvetin yönünü gösterir.
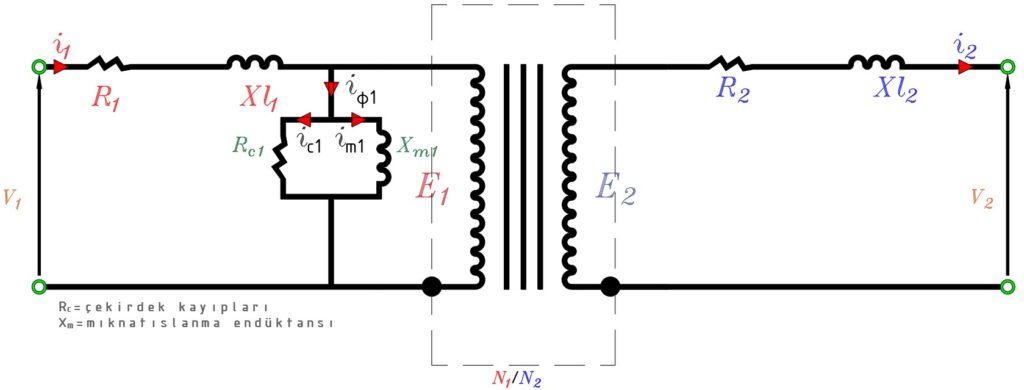
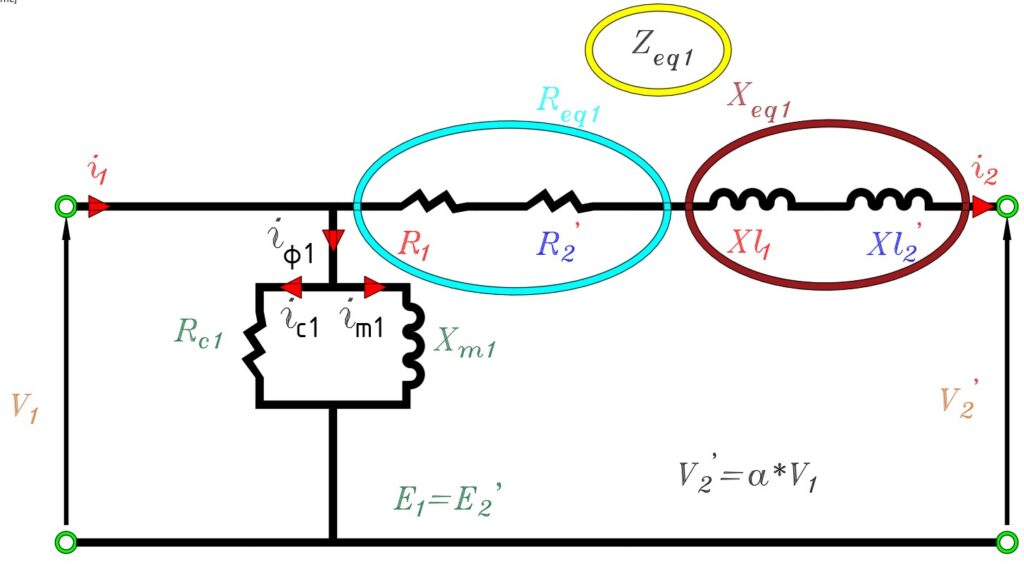
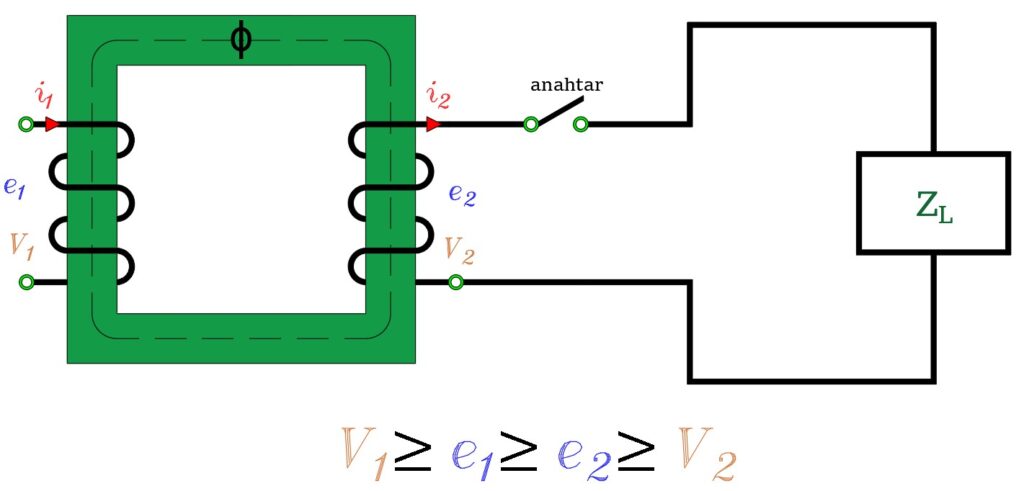
Eşdeğer devrelerin parametrelerini bulmak için iki basit deney yapılır. Bunlar, primer giriş gerilim, akım ve gücünün ölçüldüğü, sekonderin kısa devre ve açık devre (boşta) çalışma incelemeleridir.
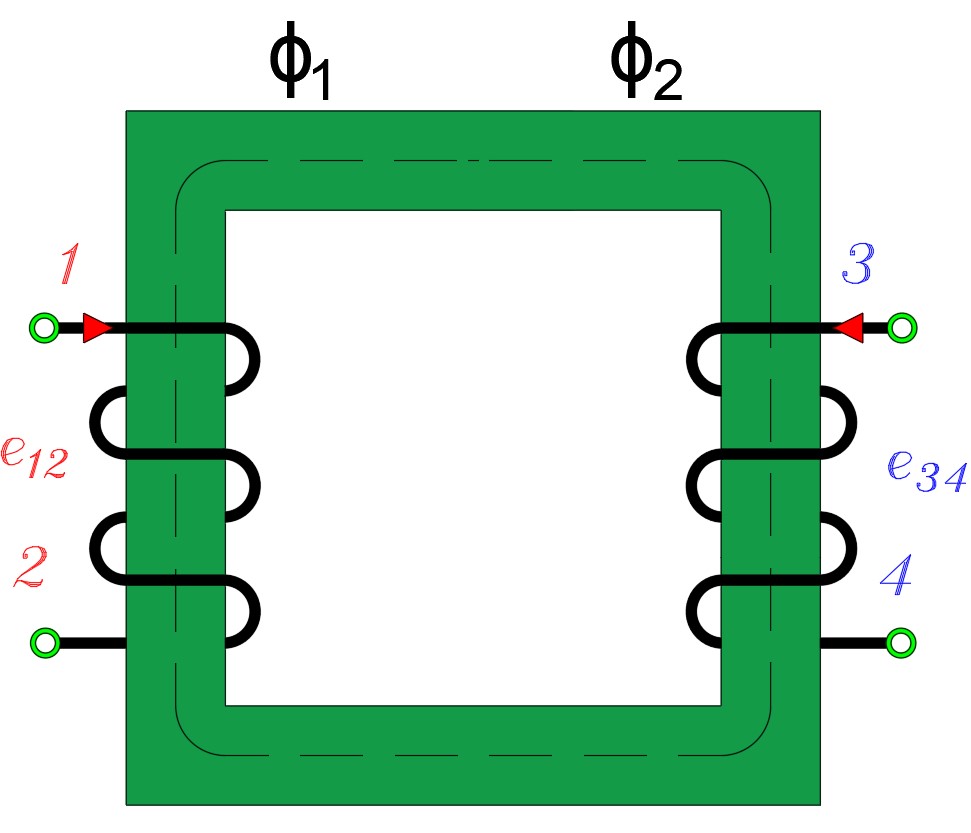
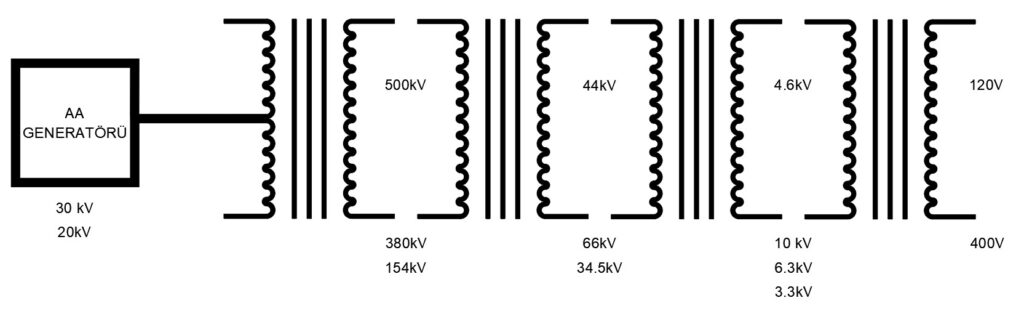
Üç fazlı ya da bir fazlı transformatörün kataloğunda aşağıdaki parametrelerin verilmesi gerekir;
SN= Görünür Gücü (kVA,MVA)
V1/V2= Faz gerilimleri (bir fazlı) ya da hat gerilimleri (üç fazlı) (V, kV)
P0= Boşta çalışma güç kayıpları (W, kW)
Ikd= Boşta çalışma akımı (%)
Pkd= Kısa devre güç kayıpları (W, kW)
Vkd= Kısa devre gerilimi (%)
KISA DEVRE DENEYİ
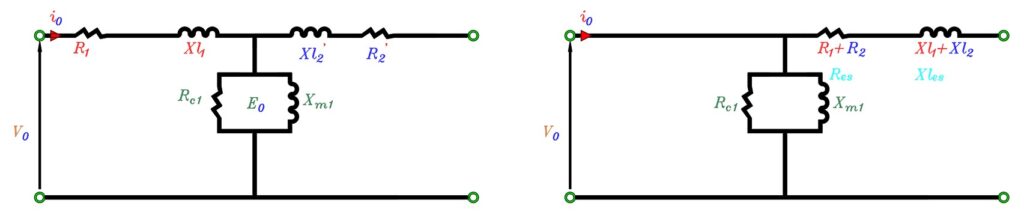
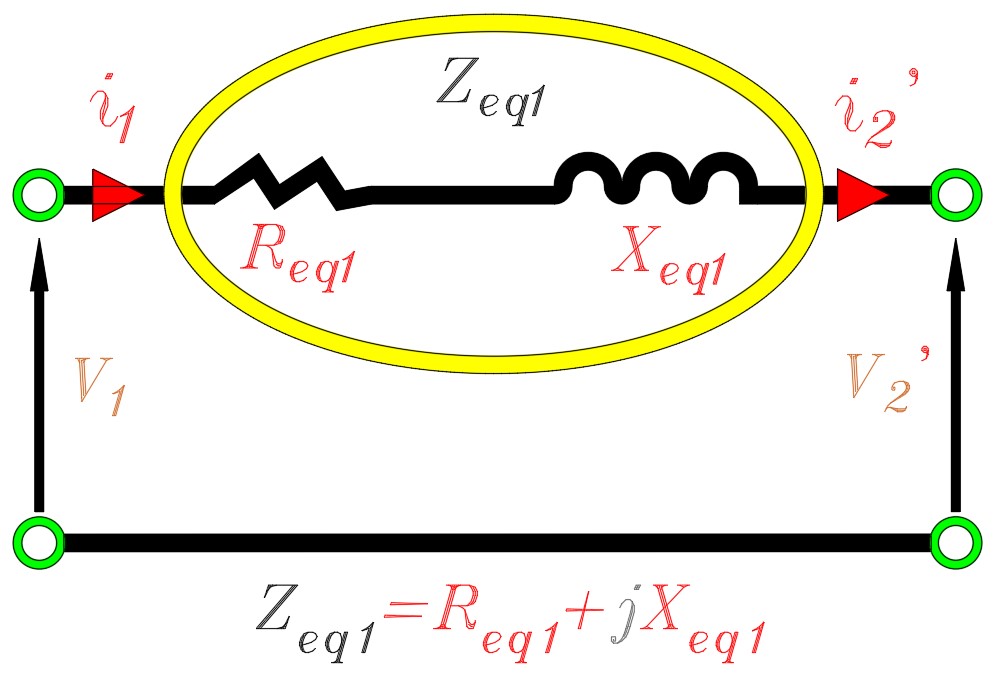
Kısa devre deneyi ile Reş+jXeş eşdeğer seri empedans bulunabilir. Kısa devre edilecek sargıların seçimi isteğe bağlı olmasına rağmen, karışıklık olmaması için burada transformatörün sekonder sargıları kısa devre edilerek, gerilim primere uygulanacaktır. Kolaylık açısından deneylerde genellikle yüksek gerilim tarafı primer seçilir. Normal transformatörlerde eşdeğer seri empedans küçük olduğundan, primere uygulanan geriliminin anma gerilimin %10 veya %15’i arasında veya daha az uygulanması anma akımının çekilmesine neden olur.
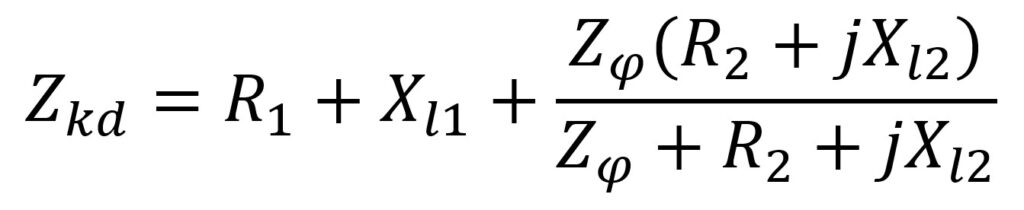
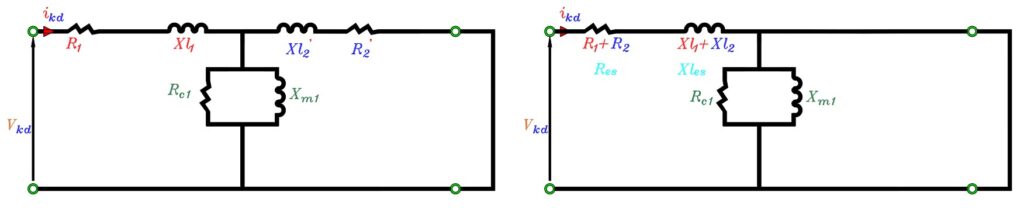
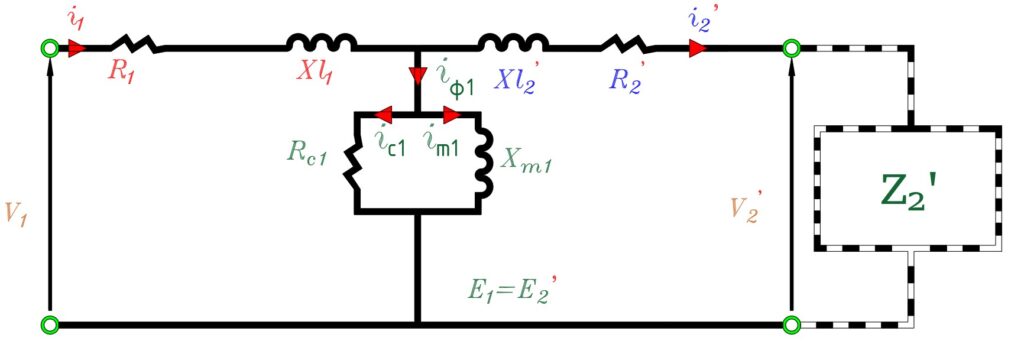
Yukarıdaki resim sekonderi primere indirgenmiş transformatörün eşdeğer devresini göstermektedir. Burada kısa devre sekondere uygulanmıştır. Bu şartlar altında primer uçlardan görülen kısa devre empedansı Zkd şu şekilde hesaplanır;
Zφ uyarma kolu empedansının sekonder kaçak empedansından çok daha büyük olması nedeniyle (Primere uygulanan aşırı gerilim nedeniyle çekirdek iyice doymaya gitmedikçe bu doğrudur; burada böyle bir durum yoktur), kısa devre empedansı yaklaşık olarak aşağıdaki gibidir.
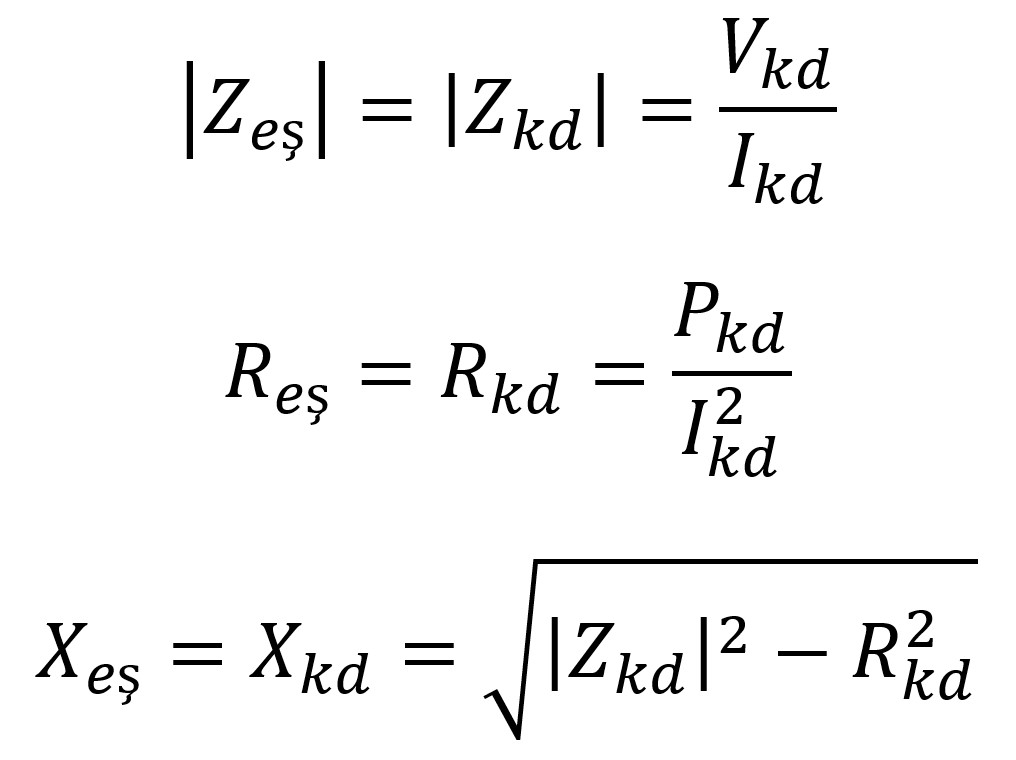
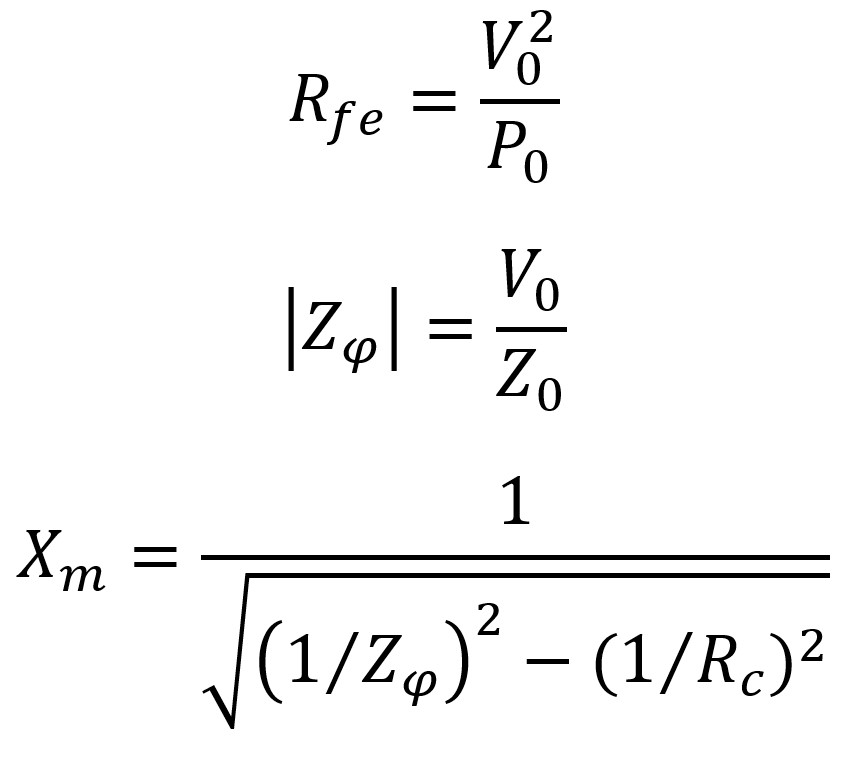
Bu deney için Vkd uygulanan gerilimin, Ikd kısa devre akımının ve Pkd gücün etkin değerleriklasik ölçü aletleri kullanılarak ölçülür. Bu ölçümler kullanılarak eşdeğer direnç ve reaktans (primere indirgenmiş) aşağıdaki formüllerden bulunur.
Burada || sembolü karmaşık değerin genliğini belirtir.
AÇIK DEVRE DENEYİ
Açık devre (boşta çalışma) deneyi sekonder açık devre iken anma primer gerilimde yapılır. Bu durumda, tam yük akımının yüzde bir kaçı kadar ( büyük güçlü transformatörlerde daha az ve küçük transformatörlerde daha fazla ) bir uyarma akımı oluşur. Anma gerilimi normal işletme şartları altındaki akı seviyesine yakın mıknatıslanma reaktansı oluşacak şekilde seçilir. Eğer transformatör anma değerinden farklı bir gerilimde çalışacaksa, deney bu gerilimde yapılmalıdır. Kolaylık için genellikle deneyde alçak gerilim tarafı primer olarak seçilir. Eğer bu deneyde kısa devre deneyine göre primer olarak diğer sargı seçilirse, transformatörün aynı tarafından ölçülen değerlerden bu parametrelerin bulunması için indirgeme taraflarına dikkat edilmelidir.
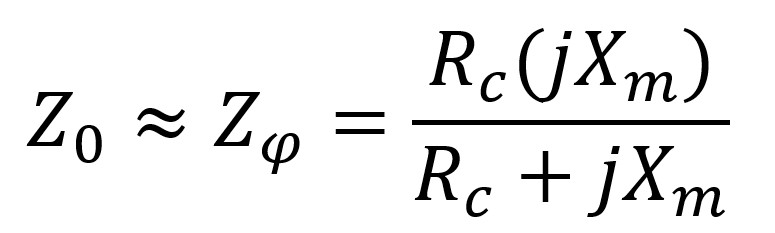
Yukarıdaki resimde sekonder empedansı primere indirgenmiş ve sekonder tarafı açık devre olan transformatör eşdeğer devresini göstermektedir. Primerden bakarak açık-devre empedansı Z0 bu şartlar altında aşağıdaki gibidir.
Uyarma kolunun empedansı oldukça büyük olduğundan, uyarma akımının sebep olduğu primer kaçak empedanstaki gerilim düşümü ihmal edilebilir ve primere uygulanan V0 gerilimi, çekirdekteki akı tarafından endüklenen E0 emk’ya çok yakın değerdir. Benzer şekilde uyarma akımının sebep olduğu primer I20R1 kayıpları ihmal edilebilir, çünkü boşta çalışma gücü P0 çekirdek kayıpları E02/Rc değerine oldukça yakındır. Yani primer kaçak empedansı ihmal edip açık devre empedansına mıknatıslanma empedansını yaklaşık olarak eşit kabul edebiliriz.
Kısa devre deneyindeki gibi bu deney için de kullanılan cihazlarla V0 uygulanan gerilimin etkin değeri, I0 açık devre akımı ve P0 gücü ölçülecektir. Kaçak empedansı iptal ederek ve bu üç ölçüm değerini kullanarak, mıknatıslanma direnci ve reaktans ( primer tarafa göre) şu şekilde hesaplanır;
Elde edilen değerler bu deneyde primer olarak seçilen tarafa göredir.
ÖRNEK SORU
1Φ Bir trafoda 10kVA, 2200/220V, 60Hz aşağıdaki değerler okunmuştur. Açık devre (yüksek gerilim tarafı açık) olan durumda Voltmetreden 220V, Ampermetreden 2.5A, Wattmetreden 100W; Kısa devre için (Alçak gerilim tarafı kısa devre) Voltmetreden 150V, Ampermetreden 4.55A, Wattmetreden 215W değerleri ölçülmüştür.
(a) Alçak ve yüksek gerilim sargıları için parametreleri bulun
(b) Boşta çalışma ve kısa devre deneyleri için güç faktörlerini bulun.
ÇÖZÜM
V1=VH=2200V
V2=VL=220V
2200/220=10=a
V1*i1=Vi*i2=10000V
İ1=iH=10000/2200=4,55A
İ2=iL=10000/220=45,5A
(a)
Eşdeğer devre (boşta çalışma karakteristiği için) sekonder tarafa 220V uygulayalım.
Transformatörlerin sargıları, polariteleri ile ifade edilir. Aşağıdaki şekildeki sargıyı inceleyelim. (1) ve (3) numaralı terminaller birbirine benzer. Her iki terminalden akım içeriye doğru akar. Çekirdek aynı yönde akı oluşturur ve bunlar manyetik yolda akı oluştururlar. Bu durum (2) ve (4) numaralı terminallerde de benzer şekilde oluşur.
Endüklenen gerilim e12 ve e34’de aynı fazdadırlar. Bu sebepten 1 ve 2 ile 3 ve 4 yukarıdaki gibi gösterilirler.
PRATİKTE TRANSFORMATÖR
Pratikte bir transformatörde;
Sargıların dirençleri mevcuttur.
Her sargı aynı akıyı oluşturmaz.
Çekirdek malzemesinin permeablitesi homojen değildir.
Çekirdek kayıpları mevcuttur.
Pratikte, gerçek trafonun analizinde yukarıdaki özelliklerin göz önünde bulundurulması gerekir.
Pratik trafonun analizinde ideal trafodan hareketle iki metot kullanılır:
Fiziksel yapıdan hareketle bir eşdeğer devre modeli
Klasik teoriden hareketle manyetik kuplajlı devrelerin matematiksel modeli.
Her iki yöntemde yaygın olarak kullanılır ve döner makine teorisinde birbirine çok yakın sonuç verirler. Fiziksel dönüşümün teorilerini kusursuz karşıladığı için burada eşdeğer devre tekniği kullanılacaktır.
Temel Trafo Devresi
Trafo Eşdeğer Devresi Temeli
Transformatörlerde ve diğer ferromanyetik malzemelerde, ortak akı Φm’in dışında Φ1 ‘de, yukarıdaki şekilde gösterildiği gibi kaçak akılarda oluşur. Bu akılar, bir sargıda akar ve manyetik devreyi etkilemez. Kaçak yol genellikle havadır ve akan akıma göre değişir (lineer). Kaçak akı genellikle bir endüktans (L) ile sembolize edilir.
Sargı dirençleri ve kaçak akıların oluşturmuş olduğu endüktanslar ile primer ve sekonder bağlantıları tanımlanmış olur.
Pratik olarak manyetik bir çekirdekte
sonlu geçirgenlik ile çekirdekte bir mıknatıslanmayı oluşturmak üzere Im
mıknatıslanma akımı akar. Bu olay mıknatıslanma endüktansı Lm ile
sembolize edilir. Aynı şekilde çekirdek kayıpları da manyetik malzeme için Rc
direnci ile ifade edilir.
Yukarıdaki şekildeki eşdeğer devre, bu eşdeğer devredeki
büyüklükleri sağa ve sola kaydırarak (yani primer veya sekonder tarzla)
incelenebilir.
İdeal transformatörün sağa kaydırılmış durumu aşağıdaki resimde incelenebilir.
İdeal Trafonun Sağa Kaydırılmış Eşdeğer Devresi
Pratik transformatör, ideal transformatöre ilave olarak, harici endüktanslar çekirdek kayıpları (Rc) ve mıknatıslanma endüktansı (Xm) ile genişletebilir.
EŞDEĞER DEVRELER
Bütün akım, gerilim ve empedansları bir tarafa geçirerek eşdeğer devre aşağıdaki şekle dönüşür.
Yukarıdaki devredeki tüm değerler giriş kısmına refere edilmiştir. Sarım oranının bilinmesi halinde tüm analizler yapılabilir.
Yaklaşık Eşdeğer Devre
Yukarıdaki resimde görülen i1*R1 ve i1*Xl1 gerilim düşümleri, normalde relatif olarak küçüktür. Ve buradan hareketle,
|E_1 |=|V_1 |
kabulü yapılabilir. Paralel empedans (Rc1 ve Xm1) giriş terminaline taşınabilir. Böylece akımların hesabı kolaylaşır, dirençler ve endüktanslar birleştirilebilir. Bu eşdeğer devre pratik bir transformatörün analizinde kullanılabilir.
Hareketli parçası olmayan (statik bir makine olan)
transformatör, bir enerji dönüşüm makinesi olmamasına rağmen birçok enerji
dönüşüm sistemlerinde kullanılır. Transformatörler,güç sistemlerinin en uygun
gerilimi üreterek, en ekonomik ve en uygun güç ile transferini mümkün kılar.
Transformatör, ortak manyetik akı ile birleştirilmiş iki veya daha fazla
sargıdan oluşur. Transformatörün analizi
elektrik makineleri için birçok temel prensibi öğretir. Yüksek akı
yoğunluğu elde etmek için bu cihazlarda da ferromanyetik malzeme kullanılır.
Demir çekirdekli transformatörler, yüksek güçlerde kullanılırbu tip trafoların
manyetik kutupları da çok önemlidir.
Genelde kullanılan iki yaygın tip imalat şekli aşağıda gösterilmiştir;
a) Çekirdek tipi b)Kabuk (Shell) tipi-mantel
Çekirdek tipinde
sargılar dikdörtgen şeklindeki manyetik çekirdeğin iki bacağı etrafına sarılır;
mantel tipte sargılar üç bacaklı
çekirdeğin orta bacağına sarılır.
Çekirdek kayıplarını azaltmak için ince laminasyonlar seçilir. Birkaç yüz Hertz frekansa kadar, silikon çelik ve kalınlıkları 0,014inch (0,035cm) olan laminasyonlar seçilir. Trafolarda “T” ve “E” tipi laminasyonlar kullanılır.Hava aralığını ortadan kaldırmak içinj, bu laminasyonlar uygun şekilde yerleştirilir.
İki sargılı transformatörün şematik çizimi
Sargılar arasına çizilen düşey 2 çizgi, sargılar
arasındaki manyetik kuplajı gösterir.Bu sargı alternatif gerilim
kaynağına bağlıdır ve sekonder sargı adını alır.
Sarım sayısı yüksek olan sargıda yüksek gerilim olduğundan,
bu sargıya aynı zamanda yüksek gerilim sargısı da denir. Diğer sargı alçak
gerilim sargısı adını alır.
Manyetik kuplajın sıkı olmasını temin etmek amacıyla,
sargılar bobinler şeklinde yapılıp, diğerinin üzerine veya yanına konur.
Genelde alçak gerilim sargıları çekirdeğe daha yakın konulur.
Trafoların birinci görevi gerilim seviyesini değiştirmektir.
Trafo kullanarak enerjinin taşınması
Trafoların diğer kullanım alanı güç ve kontrol devrelerinde
bir devreyi diğerinden galvanik olarak yalıtmak içindir
Trafolar ayrıca gerilim ve akım ölçmek için kullanılır.
İDEAL TRANSFORMATÖR
İki sargılı bir trafo göz önüne alalım. Primer sargısında N1, sekonderinde N2 sarım olsun. Trafoların sarılış şekilleri yapraklı olmasına rağmen, sembolize şekli ile gösterilirler.
İdeal trafonun özelliklerinde şu kabulleri yapalım;
1) Sargı dirençleri ihmal edilmektedir.
2) Kaçak akı yoktur. Çekirdek kayıpları ihmal edilmektedir.
3)Çekirdeğin permeablitesi sonsuzdur (μ=∞). Bu sebepten, çekirdekte akı
oluşturmak için gerekli uyarma akımı ihmal edilebilir. Yani çekirdekte akı
oluşturmak içi net mmf 0’dır.
Primer sargıya zamanla değişen bir alternatif gerilim uygulanırs, çekirdekte zamanla değişen Φ akısı meydana gelir. Sargıda e1 gerilimi endüklenir ve bu gerilim uygulanan gerilime eşittir. (Sargının direnci ihmal edildiği için.)
V1 sinüsodial ise, efektif değerleri göz önüne alınarak;
Bulunur. a sargıların sarım sayısı oranıdır. Son denklemden, gerilimlerin oranının, sargıların oranına eşit ve doğru orantılı olduğu görülür.
Şekildeki anahtarı kapatarak, trafonun sekonder sargılarına bir yük bağlandığında, sekonder sargıda i2 akımı akar, Sekonder sargı çekirdekte magnetomotor kuvveti oluşturur. Bu kuvvet primer sargıda i1 akımının akmasına neden olur. N1, i1’i; N2, i2’yi karşılar. Akı oluşturmak için ideal bir çekirdekte mmk sıfır olduğu için;
Buradan çekirdek akımlarının oranı sarım sayılarının oranı ile ters orantılı olduğu görülür. Yük sekonder sargıdan daha fazla akım çekerse, trafoda kaynaktan fazla akım çeker.
Giriş tarafındaki ani gücün çıkış tarafındaki ani güce eşit olduğu görülür. Bu da tabiidir, çünkü tüm kayıplar ihmal edilmiştir. Beslenme kaynağı ile yük arasında fiziksel hiçbir bağlantı olmamasına rağmen beslenme kaynağından çıkan güç tamamen yüke aktarılmaktadır.
Empedans Transferi
İdeal transformatördeki empedans transferi
Giriş Empedansı
Bir transformatörün sekonderine bağlanan Z2 empedansı primerden bakıldığında Z1 (Z2’) olarak görülürSekonder empedansı, primer empedansa sarım sayısı oranı karesi olarak dönüştürülebilir. Primer empedansı da benzer şekilkde sekondere dönüştürülebilir.
Çıkış Empedansı
ÖRNEK SORU:
9Ω omik empedansı olan bir hoparlör 10V’luk ve iç direnci (omik) 1Ω olan kaynağa bağlanmaktadır.
a)Hoparlörün çektiği gücü hesaplayınız.
b) Hoparlöre transfer edilen gücü maksimize etmek amacıyla a=1/3 sarım sayıları oranı olan bir trafo kullanılmaktadır. Hoparlörün çektiği gücü bulun.
a)
b) Hoparlörün direnci primer tarafa transfer edilirse;
Yukarıdaki resimdeki manyetik sistemi göz önüne alalım. Bobin akımı 4 Amper , hava aralığı uzunlukları 1mm ise, hava aralığındaki akı yoğunluğu (Bg) nedir?
ÇÖZÜM:
Bir önceki haftadaki örnekte akı yoğunluğu verilmiştir. Böylece kolayca manyetik şiddet ve mmk bulunabildi. Bu örnekte akı ya da mmf verilmiştir. Akı yoğunluğu bulunacaktır. Hava aralığı için B-H karakteristiği doğrusaldır.
Yük Doğrusu Metodu;
Manyetik devre için (uzunluğu lc ve hava aralığı lg)
Bulunan bu eşitlik mx+c şeklindedir ve bir doğrunun denklemidir. Yük eğrisi olarak ifade edilen bu eğri çekirdeğin B-H eğrisi üzerine çizilebilir. Hava aralığı 1mm olarak verdiği ve iki tane hava aralığı olduğu için lg değerini 2 olarak alacağız.
Yukarıdaki grafikteki yük doğrusu, B-H eğrisini B=1,08T’ da kesmektedir. B-H doğrusunun H eksenini kestiği yer ise yukarıdaki denklemde B=0 değeri için;
2. METOT
Tüm manyetomotor kuvvet hava aralığında ise (yani Hc=0) hava aralığı akı yoğunluğu;
Bg’nin bulunan bu değeri, yük eğrisinin 3 eksenindeki değeridir. Eğer tüm mmf çekirdeğe etkiyorsa (Bg=0) o zaman;
Bu değerde H eksenindeki değeridir. Bu şekilde eğri çizilebilir.
ÖRNEK SORU:
Yukarıdaki manyetik devrede ferromanyetik malzemenin geçirgenliği (permeablitesi) 1200’dür. Magnetik kaçaklar ihmal edilmektedir. Uzunluklar cm cinsinden ve malzeme kesiti karedir. Hava aralığı akısı, hava aralığı akı yoğunluğu ve hava aralığının manyetik alan şiddeti bulunacaktır.
ÇÖZÜM:
Eşdeğer devre yukarıdaki şekilde verilmiş;
Simetriden dolayı Rbcde=Rbafe;
Çevre denklemlerini yazacak olursak;
Veya;
Veya;
Ferromanyetik Malzemelerdeki Enerji Kayıpları
Ferromanyetik malzemelerde histerizis ve Eddy akımı kayıpları olmak üzere iki çeşit kayıp meydana gelmektedir.
Histerizis Kayıpları:
Demir içinde domainlerin yönünü değiştirmek için gerçekte
bir enerjiye gerek duyulması, bütün makinalarda ve transformatörlerde ortak
olan bir enerji kaybına neden olur. Bir demir nüveye uygulanan alternatif
akımın her bir saykılı boyunca domainlerin yön değiştirmesi için harcanan
enerjiye histerizis kayıpları denir. Histerizis çevrimini nüveye uygulanan
alternatif akım şekillendirir ve histerizis çevriminin alanı her bir saykıldaki
enerji kayıplarıyla orantılıdır.
Dar bir aralıktaki histerizis çevrimi düşük histerizis kayıplarını göstermektedir. Histerizis kayıpları aşağıdaki denklem ile ifade edilebilir.
Eddy Akımı Kayıpları:
Nüve içindeki akımların diğer bir kaynağı da nüve içinde değişen manyetik alanlar tarafından üretilir ve Eddy Akımı Kayıpları olarak adlandırılır. Faraday Kanunu’na göre zamanla değişen akı nüve etrafına sarılı sargılarda bir gerilim endüklediği gibi manyetik bir nüve içerisinde de bir gerilim endükler. Bu gerilimler aşağıda gösterildiği gibi nüve içerisinde akımın bir halka şeklinde dolaşmasına neden olurlar. Bu olay su akıntısındaki girdaplara da benzetilir ve ismini de oradan almıştır.
a) Blok demir ve nüvedeki enerji kayıpları b) Paketli saçlardan yapılmış nüvedeki eddy akımları
Eddy Akım Kayıpları uyartım frekansının karesi ve pik akı yoğunluğunun kareleri ile doğru orantılıdır. Birim hacim başına ve nüvenin toplam eddy akımı güç kayıpları;
Hem Histerizis hem de Eddy Akımı Kayıpları nüvenin ısınmasına neden olurlar. Bu iki kayıp makine ve transformatör tasarımında özellikle dikkate alınmalıdır.
BAKIR KAYIPLARI
Transformatör sargılarında bakır iletken kullanıldığından sargı dirençlerinden ötürü meydana gelen ısı kayıplarıdır.
Elektrik Makinelerinde, rotor, fiziksel olarak bir hava
aracılığı ile stratordan izole edilmiştir. Statordan rotora olan akı
yoğunluğunu sabit muhafaza etmek için, hava aralığında, normalde çekirdeğe göre
çok daha fazla manyetomotor kuvvetine ihtiyaç vardır.
Eğer akı yoğunluğu fazla olursa, manyetik devrenin çekirdek kısmı doymaya gider. Ancak, hava aralığı, B-H değeri, hava ortamı için lineer (μ sabit) olduğundan doymaya gitmez.
Dönen bir makinenin arakesiti
İki ya da daha fazla ortamı olan manyetik devreler örneğin
manyetik çekirdek ve hava aralığı gibi, birleşik bir analiz yapısına sahiptir.
Analiz amacıyla, birleşik yapılar için manyetik eşdeğer devreler türetilebilir.
Aşağıdaki birleşik yapıya bakılacak olursa, burada sürücü kuvvet magnetomotor kuvveti F=Ni ve çekirdek ortamı ve hava aralığı ortamı kendilerine ilişkin relüktansları ile ifade edilebilirler. Eşdeğer manyetik devre aşağıda gösterilmiştir.
lc çekirdeğin ortalama uzunluğu, lg hava aralığının ortalama uzunluğudur.
Birleşik yapı (a) hava aralıklı manyetik çekirdek (b) manyetik eşdeğer devre
Akı yoğunlukları ise,
Şeklindedir. Hava aralığında manyetik akı, aşağıdaki şekilde görüldüğü gibi kaçak etkileri de oluşturur. Küçük hava aralıklarında bu etki ihmal edilebilir. Ancak büyük hava arlıklarındaki etkisi hava aralığı yüzeyini büyütme şeklindedir. Hava aralığını küçük kabul edersek, çekirdek ve hava aralığı kesitleri küçük olduğundan
Yazılabilir.
Kaçak akı
ÖRNEK SORU:
Şekilde basit bir devrenin manyetik devresi görülmektedir.
Bobinin 500 sarımı vardır. lc =360mm
(çekirdek uzunluğu). Hava aralığının her biri 1,5 mm’dir. Röleyi aktif etmek
için 0.8 Tesla’ya ihtiyaç vardır. Çekirdek ise döküm çeliktir.
a) Bobin akımı ?
b) Permeablite ve relatif permeablitesi nedir?
c) Hava aralığı 0 ise bobin akımı 0.8 T için ne olacak?
Soruda bizlere çekirdek yapısının döküm çelik olduğunu ve
manyetik akı yoğunluğunu B=0.8 T olarak verdiği için bu değerden manyetizasyon
eğrisi aracılığı ile çekirdek için manyetik alan şiddeti ( Hc) değerini bulacağız.
Hc=510(At/m)
Daha sonra bu değeri soruda bizlere verdiği çekirdek
uzunluğu miktarı ile çarpıp çekirdeğin manyetomotor kuvvetini bulacağız.
Mmf=F=Hc× lc =510
[At/m]*0,36[m]=184[At]
Çekirdeğin manyetomotor kuvveti miktarını bulduk. Şimdi
şekilde görüldüğü üzere 2 adet hava boşluğu bulunan devrenin hava
boşluklarındaki manyetomotor kuvvet miktarını bulacağız.
Hava aralığı için;
Çekirdeğin ve hava boşluğunun manyetomotor kuvvetlerini bulduktan sonra bu iki kuvveti toplayıp toplam manyetomotor kuvvetini buluyoruz. Ancak burada dikkat edilmesi gereken bir nokta var ki o da yukarıda görüldüğü üzere havanın oluşturduğu manyetomotor kuvvet çekirdeğin oluşturduğu manyetomotor kuvvetin yaklaşık 10 katıdır.
Şimdi bobinin akımının bulabiliriz.
(b) Çekirdeğin Permeablitesi:
Relatif Permeablite(çekirdek):
(c) Hava aralığı yok ise sadece çekirdeğin akımı olur bu durumda;
ENDÜKTANS
Bir manyetik çekirdeğe bobin sarılması ile meydana oluşur.
Bir bobinin endüktansı ve eşdeğer devresi
Bağıntısı, endüktansı fiziksel boyutlarda tanımlamaktadır.(alan-uzunluk gibi).Burada önemli olan bağıntı L endüktans değerinin sarım sayısının karesi ile değişimidir.
ÖRNEK SORU:
Toroid
Şekildeki bobinde sarım sayısı: N=250
Malzeme: silikonlu çelik
İç yarıçap: 20cm
Dış yarıçap: 25cm
a) Toroidin ortalama yarıçapındaki manyetik alan yoğunluğunu
bulunuz.
b) Bobindeki akı yoğunluğunu sabit ve ortalama yarıçaptaki değerine eşit olduğunu kabul ederek bobinin endüktans değerini bulunuz.
Teorik anlamda elektrik enerjisinin formunu ya da şeklini
değiştiren makinelere elektrik makineleri denir.
Sabit (Hareketsiz) Elektrik Makineleri: Trafo, röle
Hareketli Makine Elemanları: Elektrik Motorları (D.C. A.C. Motorlar)
Her elektrik motoru aynı zamanda bir elektrik makinesidir ama her elektrik makinesi elektrik motoru değildir.
Manyetik devreler, Ferromanyetik malzeme üzerinden sargılardan geçirilen akım sayesinde elde edilir.
i-H Bağlantısı (Akım-manyetik alan şiddeti)
Eğer iletken sağ el ile tutuluyor, başparmak akımın yönünü gösteriyorsa diğer parmakların yönü de manyetik alan şiddetini gösterir. Herhangi bir yüzey kesitindeki manyetik alan şiddetinin tanımlanan bu kesit alan üzerinden integrali bu kesitte belirlenen akımların toplamına eşittir.
Akım etrafında oluşan manyetik alan şiddetinin gösterilmesi
Amper Yasasının Gösterimi
Burada H, belirlenen yüzeydeki manyetik alan şiddeti, dl ise, bu yüzeydeki birim uzunluktur. Yüzey ile H arasındaki açı θ ise, o zaman ifade:
şekline dönüşür.
Eğer H ile i dik ise cosθ’ ya gerek yoktur.
Akım taşıyan iletkenin oluşturduğu manyetik alan şiddeti
Bir iletkenin yukarıdaki şekildeki gibi akım taşıdığı kabul edilirse, manyetik alan şiddeti H’ın iletken er kadar uzaklıkta alacağı değeri bulmak için, yarıçapı r olan bir daire çizerek H ile dl arasında θ=0 olduğunu göz önüne alarak
B-H Bağlantısı (Manyetik alan yoğunluğu-manyetik alan şiddeti)
Manyetik alan şiddeti H, manyetik alan yoğunluğunu (B) oluşturur. Bu iki kavram arasındaki bağıntı ise;
µ ortamın karakteristiği olması , ortamın permeablitesi,
µo uzayın permeablitesi
4*π*10-7 henry/metre
µrortamın relatif permeablitesi
permeablite-> manyetik özgeçirgenlik
Boş uzay ve elektriksel iletkenlerin (bakır ve alüminyum gibi)
yalıtkanların relatif permeablitesi 1’dir.
Demir, kobalt, nikel gibi ferromanyetik malzemelerin, relatif
permeablitesi birkaç yüzden birkaç bine kadar çeşitli değerler alabilir.
Elektrik makinalarında kullanılan relatif permeablites değerleri 2000 ile 6000 arasında değişir.
Relatif permeablite değerinin büyük olması, küçük bir akının büyük bir akı yoğunluğu oluşturabilmesi anlamına gelir.
Manyetik Eşdeğer Devre
Dairesel manyetik çekirdeği (nüvesi) olan manyetik devre görülmektedir. Bu toroidal çekirdeğe iletken sarılmıştır. N sarımdan oluşan bobinden i akımı aktığında manyetik akı çekirdek içinde kalır.
Toroidal manyetik devre
Toroidin dışındaki kaçak akı o kadar düşüktür ki ihmal edilebilir. Yarıçapı r olan toroidi incelediğimizde, bu yarıçap yolu üzerindeki manyetik alan şiddeti H ise, Amper yasasından hareket ederek;
N*i büyüklüğüne magnetomotor kuvvet [mmk] denir. (magnetomotor force [mmf]) ve birimi amper sarımdır.
N*i=(amper sarım)
Kaçak akı olmadığını farzedersek;
B: Çekirdekteki ortalama akı yoğunluğu
toroidin ortalama yarıçap yükü üzerindeki yoğunluğa karşılık gelmektedir.
Eğer H, bu mesafedeki manyetik şiddet ise;
Manyetik devredeki elektriksel eşdeğeriyle birlikte gösterilir.
Manyetik akı yoğunluğu doyma noktasına ulaştıktan sonra daha fazla artmaz çünkü tanecik sayısı maksimum noktaya ulaşır.
Yapay zekâ, insan tarafından yapıldığında zekâ olarak adlandırılan davranışların makine tarafından da yapılmasıdır. Daha geniş bir ifade ile yapay zekanın ana hedefi, doğadaki varlıkların akıllı davranışlarını yapay olarak üretmeyi amaçlayan bir kuramın oluşmasıdır.
Başlıca yapay zekâ teknikleri:
1) BULANIK MANTIK VE BULANIK KÜMELER:
Günlük konuşmalarımızda kullandığımız birçok terim bulanık yapıya sahiptir. Bir olayı açıklarken, bir nesneyi tanımlarken kullandığımız ifadeler bulanıklık içerir. Hava durumu ile ilgili havanın çok soğuk olması veya çok sıcak olması, karşımızdaki insanın boyunun çok uzun veya çok kısa olması, bize sürekli yardım eden birisinin çok iyi ve yardımsever olduğuna karar vermemiz günlük hayattaki bulanık mantık örneklerindendir. Bulanık mantık yapısında net olarak 0-1, uzun-kısa, güzel-çirkin, gibi kavramların ötesinde kesinlik arzetmeyen; 0,7, çok uzun, çok çirkin gibi kavramlar vardır.
Bulanık mantık teorisi Lotfi A. Zadeh tarafından geliştirilip 1965 yılında yayımlanan makalesinin ardından kesinlik içermeyen sistemlerin incelenmesi süreci farklı bir boyuta taşınmıştır.
2) YAPAY SİNİR AĞLARI:
Yapay sinir ağları, biyolojik sinir sistemi taklit edilerek öğrenme,
hafızaya alma, veriler arasında bağlantı
kurma gibi özelliklere sahip olabilen yapılara verilen isimdir. Yapay sinir
ağları dediğimizde aklımıza şu 5 kavramın gelmesi gereklidir.
1) Girdiler
2) Ağırlıklar
3) Birleştirme Fonksiyonu
4) Aktivasyon Fonksiyonu
5) Çıktılar
3) GENETİK ALGORİTMALAR
Genetik algoritmaların amacı hiçbir çözüm tekniği bulunmayan problemlere çözüm aramaktır. Genetik algoritmaların yapısı ile ilgili bilmemiz gereken kavramlar şunlardır:
Genetik algoritmaların amacı hiçbir çözüm tekniği bulunmayan
problemlere çözüm aramaktır. Genetik algoritmaların yapısı ile ilgili bilmemiz
gereken kavramlar şunlardır:
1) Kodlama
2) Uygunluk
3) Genetik İşlemciler
4) UZMAN SİSTEMLER
Uzman sistemleri bilgisayarda hazırlanmış yardımcılar olarak
düşünebiliriz. Tıp, finansal planlama, bilgisayar konfigürasyonu, gerçek
zamanlı sistemler, trafik yönetimi ve kontrolü, sigortacılık
bazı uygulama
alanlarıdır. Uzman sistemler temel olarak 3 ana yapıdan
oluşur:
Dolaylı Yöntem: Güneş termik enerji üretimidir.
Güneş enerjisinin yoğunlaştırıcı sistemler kullanılarak odaklanması sonucunda
elde edilen kızgın buhardan geleneksel yöntemlerle elektrik üretilir.
Doğrudan Yöntem: Fotovoltaik, termoelektrik ve
termoiyonik çevriciler yeralır. Büyük çapta elektrik üretimi için sadece
fotovoltoik (PV)sistemler kullanılır.
Güneş ısıl güç santrallerinin tasarımında şu etmenler
dikkate alınır:
Bölge seçimi
Güneş enerjisi ve iklim değerlendirmesi
Parametrelerin Optimizasyon
Güneş ısıl güç santrallerinin kurulacağı ideal bölge
seçilirken aşağıdaki ölçütler göz önünde bulundurulur:
Yıllık yağış miktarı düşük olmalıdır.
Bulutsuz ve sissiz atmosfere sahip olmalıdır.
Hava kirliliği olmamalıdır.
Ormanlık ve ağaçlık bölgelerden uzak olmalıdır.
Rüzgar hızı düşük olmalıdır.
Santralin kurulacağı bölgenin yılda en az 2000 saat güneşlenme süresine ve m2 başına yıllık 1500kWh’lık güneş enerjisi potansiyeline sahip olması gereklidir. 4 saatlik güneşlenme süresine sahip gün sayısının 150’den az olmaması gerekir.
Güneşten Fotovoltaik Elektrik Üretimi
Güneş pilleri, güneş ışınlarını doğrudan elektrik enerjisine dönüştürebilen hareketli mekanik parçaları olmayan elektronik sistemlerdir.
Güneş pillerinin yapımında yaygın olarak şu malzemeler
kullanılır.
Kristal Silisyum
Kadminyum Tellür(CdTe)
Amorf Silisyum
Bakır İndiyum Diselenid (CuInSe2)
Galyum Arsenik(GaAs)
Optik Yoğunlaştırıcı Hücreler
Günümüzde en çok tercih edilen güneş pilleri, tek ve çok kristalli
silisyum hücreleridir.
Sarım açısı daha büyük, iletim daha iyi fakat sürtünmeden kayış çabuk kopabilir.
Basma kuvveti kayış gerdirilerek oluşturulur. Durağan halde kayış kollarında Fo gerdirme kuvveti oluşur.
Çalışma sırasında sürtünmeden dolayı kayış kollarında eşit olmayan F1 ve F2 kuvvetleri meydana gelir.
İş yapan kuvvet kayışını ne kadar çok gerersek Fn o kadar artar ve daha büyük kuvvet elde edebiliriz.
Kayışın Tanımı: Bir milden diğerine güç ve hareket iletmek için kullanılan mekanizmalardır. Döndüren ve döndürülen elemanlar arasına iletim için kasnaklar bu elemanlara sarılır.
AVANTAJLARI:
Kayış elastik malzeme olduğu için darbeleri
sönümler.
Yapıları basit olduğundan ucuzdurlar.
Büyük eksen aralıklarında güç iletebilirler.
Çevrim oranının değişmesi basittir.
DEZAVANTAJLARI:
Çok yer kaplarlar.
Yatak kuvvetleri büyüktür.
Hareket iletiminde kayma oluşabileceğinden sabit bir çevrim oranı sağlamayabilir.
Kayışta zamanla meydana gelebilecek uzamalardan dolayı kayışta germe kasnağına ihtiyaç duyulabilir.
Kayışın esnekliği sıcaklık (nem) ve rutubetle değişebilir.
Düz Kayış Yapısı
(Sonlu) Düz Kayış
Eksenler arası mesafenin büyük olduğu yerlerde kullanılır. Düz kayışlar istenilen uzunlukta bulunabilir.
Uzunluğunu biz belirleriz.
Düz bir kasnağa takılabilir.
V Kayış Yapısı
V Kayış
Daha az ön gerilme kuvveti ile daha büyük moment aktarımı mümkündür.
Bu kayışın takılabilmesi için tabii olarak kasnağın da V profil olması gerekir.
V kayış sonsuz kayış olarak isimlendirilir yani V Kayışın uzunluğu standarttır.
V kayışları istediğimiz uzunlukta bulamayız.
Yuvarlak Kayış Yapısı
Yuvarlak Kayış
Küçük kuvvetlerde kullanılır.
Dişli Kayış
Dişlilerde kullanılabilir.
Kayış Kollarındaki Kuvvetler
Hareket kayış ile kasnak arasında meydana gelen
sürtünme ile iletilir. Sürtünmenin meydana gelebilmesi için kayışın kasnak
üzerinde bastırılması gerekir yani Fn kuvvetinin oluşması gerekir.
Momentin etkisiyle kasnak dönmeye başladığında
basma kuvvetinden dolayı sürtünme meydana gelir.
KAYIŞ-KASNAK MEKANİZMA PROBLEMLERİ
V kayış kasnak mekanizma problemlerinde genelde:
İletilecek güç: P[kW]
devir sayıları: n1;n2; i=n1/n2
eksenler arası mesafe: e
belli olup bu işlemi gerçekleştirecek kayış tipi, boyu ve sayısı hesaplanır.
Bu hesaplarda ise aşağıda belirtilen sıra ile problemler çözülür:
1)Tahrik motorunun ve iş makinesinin (döndüren ve döndürülen) türüne, dinamik özelliklerine ve günlük çalışma sürelerine bağlı olarak işletme faktörü cibulunur. (Sayfa 661 (Tablo 21.6))
2) Nakledilecek güç işletme faktörü ile çarpılarak -hesapta esas alınacak güç- hesap gücü Ph=P*cibelirlenir.
3) Küçük kasnağın devir sayısı ve hesap gücüne göre kayış tipi (Sayfa 674 (Şekil 21.27)) ve küçük kasnağın sınırları seçilir. V kayışlarına ait çapların standart etken çapları (Sayfa 675 (Tablo 21.16))’da verilmiştir.
4) Eksenler arası mesafe e ile küçük kasnağın çapı d1 ve büyük kasnağın çapı d2=i*d1 arasındaki ilişkinin:
0,7(d1+d2 )<e<2(d1+d2)
sınırları arasında olması tavsiye edildiğinden d1 ve d2 ‘nin standart kasnak çapları arasından (Sayfa 675 (Tablo 21.16) seçiminde bu kurala dikkat edilir.
5) Sarım açısı hesaplanır:
cos β/2=(d2-d1)/(2×e)
β=2×arccos[(d2-d1)/(2×e)]
Buna bağlı olarak sarım açısı faktörü cβ (Sayfa 661 (Tablo 21.7))’den okunur.
6) Kayış için gerekli etken uzunluğun bulunması için:
Lw≈(2×e)+1,57(d2+d1 )+[(d2-d1)]^2/(4×e)
ifadelerinden hesaplanarak, kayış uzunlukları listesinden en yakın kayış boyu seçilir (Sayfa 678 (Tablo 21.18)).
w indisi; çapın ve kayış uzunluğunun kayış kesitinin tarafsız eksenine göre ölçülmüş olduğunu gösterir.
Uzunluk faktörü cu‘da aynı listeden alınır. Kayışın standart boyu ile yukarıdaki boy arasında muhtemelen bir fark olacaktır ki bu da eksenler arası mesafenin yeniden kontrol edilmesini gerektirecektir. Yeni kayış uzunluğu ile eksenler arası tam doğru mesafe :
e≈p+√(p^2-q)
p=(0,25×Lw )-0,393(d1+d2)
q=0,125(d2-d1 )^2
şeklinde tespit edilir.
7) Kayış hızının malzeme frekansının malzeme sınırlarını aşıp aşmadığı kontrol edilir.
v=(π*d1*n1)/60000 [m/s]; d[mm], n1 [d/d]
fe=(zk*v)/Lw [ s-1]
V kayışlarda femax=30 s-1
Dar V kayışlarda femax=60 s-1 alınır.
Eğer bulduğumuz eğilme frekansı yukarıda belirtilen maksimum eğilme frekansının altındaysa bu eğilme frekansı “uygundur” şeklinde belirtilmelidir.
8)Artık sıra kaç adet kayışın alınması gerektiğinin hesabına gelmiştir. Yine kataloglardan kasnak çapı, çevrim oranı ve dönme hızının ortak bir fonksiyonu olarak bir kayışın nominal gücü:
PN: (Sayfa 683-686 (Tablo 21.19-20-21-22)) yardımıyla okunur.
Nominal gücü de hesapladıktan sonra tüm bulduğumuz değerleri aşağıdaki denklemde yerine koyarak kayış sayısını hesaplıyoruz.
z=(P × ci)/( PN × cu × cβ )
MAKİNE ELEMANLARI VE KONSTRÜKSİYON ÖRNEKLERİ (FATİH C. BABALIK& KADİR ÇAVDAR)
ÖRNEK SORU-1
Elektrik motoru ile çalıştırdığımız iş makinesinin milleri arasında 500 mm mesafe vardır. Motordan makineye güç nakli dar kayış ile sağlanacaktır. Motorun gücü 20kW, devir sayısı 1450 devir/dakikadır. Çevrim oranı i=2,5,işletme faktörü ise 1,25 olduğuna göre hangi kayıştan kaç tane gerekir?
Ph=P*Ci=20*1,25
Ph=25kW
Problemde verilen güçten daha yüksek güç iletilecekmiş gibi düşünülür.
90-180mm arasında motor miline takılacak kasnak çapı 140 mm olarak seçilsin.
Bu durumda 2. Kasnak çapı;
Tablo 21.16’ya göre (Sayfa 675) ikinci
kasnak çapı d2=355mm seçilir.
Bu durumda gerçek çevrim oranı ;
Sarım açısı sayfa 675’de (Denklem 21.88):
Kayış için etken uzunluk Denklem 21.89’dan:
Etken uzunluk değerini 1800mm bulduktan sonra Cu uzunluk faktörü değeri için;
sayfa 678’deki Tablo 21.18’de Dar V Kayışı DIN 7753 SPA tipi kayışın etken uzunluğuna karşılık gelen uzunluk faktörünüCu=0,95 olarak buluyoruz.
Daha sonra sayfa 694’de (Tablo 21.20)’de SPA tipi kayış için d1=140mm, i=2,5 ve n=1450devir/dakika’ ya karşılık gelen Nominal Güç’ün 6kW olduğunu görüyoruz (PN=6kW). Son olarak sıra kaç adet kayış alınması gerektiği hesabına gelmiştir. Bu hesabı sayfa 677’deki denklem 21.95’den
Sonsuz kayış için sayfa 661’deki Tablo 21.7 β=155° için cβ=(0,95+0,92)/2=0,93
ÖRNEK SORU-2
Küçük bir dokuma tezgâhı elektrik motorunun milleri arasında yaklaşık 400mm vardır. Motordan makineye güç nakli yapılacaktır. Dar V Kayış ile motorun gücü 800kW, devir sayısı 1800devir/dakika. İş makinasının milindeki devir sayısı 720 devir/dakika olması isteniyor. İşletme faktörü 1,3 için olabilecek en küçük kasnak çaplarını kullanarak bu mekanizmayı bulunuz.
Çevrim Oranı=i=n1/n2=1800/720=2,5
Ci=1,3
Hesap gücü Ph=8*1,3=10,4kW
Şekil 21.27’den;
n1=1800devir/dakika ve Ph=10,4kW için kayış tipi SPZ d1=112-180mm arası d1=112
d2=i*d1=112*2,5=280mm standart ve uygundur. e=400mm için eksenler arası mesafe (denklem 21.87) ye göre
Kayış uzunluğu sayfa 676 (denklem 21.89)’dan:
Lw tablo 21.18’den;
1400mm standart uzunluk için seçilir. SPZ kayış tipi ve Lw=1400mm için Cu=0,96 olarak alınır.
Yeni standart kayış uzunluğu için eksenler arası tam doğru mesafe denklem 21.91&21.92&21.93’ den
Kayış hızı ve eğilme frekansı sayfa 676 (denklem 21.94)
V=10,55m/s
fe=15,1 s-1 < 60
s-1 uygundur.
Sarım açısına sayfa 675 (denklem 21.88)
Daha sonra cβ değerini bulmak için;
Sarım Açısı β
180°
170°
160°
150°
140°
130°
120°
110°
100°
90°
80°
Sonsuz Kayış
1
0,98
0,95
0,92
0,89
0,86
0,82
0,78
0,72
0,68
0,63
Sonlu Kayış
1
0,98
0,95
0,91
0,87
0,82
0,77
–
–
–
–
Düz Kayış ve V Kayışlar için sarım açısı cβ
sayfa 661’den (Tablo 21.7)’ de β=155° için cβ=0,93 olarak buluyoruz.
Bu değerden sonra Nominal Güç değerini bulmak için;
sayfa 683’de (Tablo 21.19)’dan, d1=112mm i=2,5 n=1800d/dk PN=3,87 olarak buluyoruz.
3 adet SPZ kayışının yeterli olacağını bulduktan sonra son olarak SPZ türü DIN 2212 serisi kayış için bu kayışa bağlı 3 adet kasnak için (b2) kasnak genişliğini bulacağız. Bu değeri de sayfa 668 (Tablo 21.13)’ den b2=40 mm olarak belirliyoruz.
ÖRNEK SORU-3
Bir press düz kayış üzerinden elektrik motoruyla
çalıştırılacaktır. Nakledilecek güç P=55 kWn1=1450devir/dakikan2=580devir/dakika olarak bilinmektedir. Buna göre kasnak
çaplarını boyutlandırınız.
Bu soruda bizlere düz kayış için kasnak çaplarını boyutlandırmamız istenmektedir. Düz kayış ile V kayışın boyutlandırma ve seçme işlemleri içerisinde bir takım farklı işlemleri barındırmaktadır.
İlk olarak en küçük kasnak çapını seçmemiz gerekmektedir. Bunun
için soruda bizlere verdiği P=55kW’ı n1=1450devir/dakika’ ya bölerek
P/n değerinde d1 değerine ulaşmış olacağız.
P/n=55/1450=0,0379 olarak buluyoruz ve sayfa 656 (Tablo 21.4)’den
P/n=0,0379≅0,04 [kW/dakika-1]
değerine karşılık d=200mm olarak buluyoruz. Bulduğumuz değerin 1. Kasnak
çapı yani d1 olduğunu unutmayalım.
1. Kasnak çapını bulduktan sonra 2. Kasnak çapını bulabilmemiz
için i=(d2/d1)=(n1/n2) eşitliğinden
d2=(n1*d1)/n2) eşitliğini bulup, d2=(1450*200)/580;
d2=500mm olduğunu görüyoruz.
Şimdi bu çapların standart olup olmadığını sayfa 640 (denklem 21.3)’den kontrol edelim.
İki değerinde uygun olduğunu gördükten sonra cevabımızda iki çapta standart şeklinde belirtelim.
Çap değerlerini bulduktan sonra daha sonra kayış uzunluğunu ve kayış eğim açısını bulurken kullanacağımız eksenler arası mesafe (e) değerini bulalım. Buradaki formül V kayıştaki eksenler arası mesafe formülü ile aynıdır.
Eksenler arası mesafeyi de seçtikten
sonra zaten kayış çaplarını da bildiğimize göre sıra kayış eğim açısını bulmaya
geldi. Bu açıyı ise sayfa 656’da denklem 21.58’de sinα=(d2-d1)/(2*e)=(500-200)/980=0,306122
sin-1(0,306122)=17,82° olarak α
açısını buluyoruz.
α değerini bulduktan sonra kayış sarım
açısı (β)’ yı bulmak için gerekli değeri de elde
etmiş olduk.
β=180-2*α formülünden 180-(2*17,82)= β=144,36°
Şimdi sıra kayışın uzunluğunu belirlemede… Bunun için sayfa 657’de
(denklem 21.62);
Kayış uzunluğunu da bulduğumuza göre kayış hızı ve eğilme frekansını
sayfa 657 (denklem 21.68&69) deki denklemlerden bulabiliriz. V=(π*d1*n1)/60=(π*200*103*1450)/60=15,18
m/sn (Burada birim çevirmelere dikkat etmemiz gerekli)
Eğilme frekansını bulmak için ise kayış hızını(v), sistemdeki
kayış sayısını(zk) ve kayış uzunluğunu kullanacağız. fe=(zk*v)/L=(2*15,18)/2152,8*10-3=14,28
s-1
Son olarak ise kayış genişliğini bulmak için sayfa 659’dan (denklem 21.79) b=(P*ci)/(Fç’*v*co*cβ)
Fç’= 1mm genişliğindeki kayışın emniyetle taşıyabileceği
faydalı kuvvet. Burada Fç’ değerini Tablo 21.5’den çeki tabakasının PA
veya PE elyaf kauçuk gövdede Kauçuk veya PU kayma tabakası üzerinde maksimum
olarak 200[N/mm] taşıyabileceğini görüyoruz.
Ci=1.4 (Sınavda sorulması durumunda buradaki değeri hoca verecek.)
Ortam faktörü(Co)=Tablo 21.8’den bulunacak.
Sarım açısına karşılık gelen Cβ değeri=Tablo 21.7’den;
Sarım Açısı β
180°
170°
160°
150°
140°
130°
120°
110°
100°
90°
80°
Sonsuz Kayış
1
0,98
0,95
0,92
0,89
0,86
0,82
0,78
0,72
0,68
0,63
Sonlu Kayış
1
0,98
0,95
0,91
0,87
0,82
0,77
–
–
–
–
Düz Kayış ve V Kayışlar için sarım açısı cβ
bulunacak. Bu soruda 144° için Cβ=0,87 olarak bulunuyor.
b=(55000*1,4)/(200*15,18*1*0,87)≅28mm olarak kayış
genişliğini buluyoruz.
Helisel dişli çark mekanizmasına ait mil A’ da 6308 nolu rulmanla sabitlenmiştir. B’de A ile aynı ömre sahip sabit bilyalı rulman seçiniz.
Ft=1870N
Fr=1080N
Fe=960N
mil devri=2850devir/dakika
y eksenindeki kuvvetler için;
ΣMA=0
-Fr*195+FBy*210+Fe*105=0
-1080*195+FBy*210+960*105=0
-210600+210*FBy+100800=0
FBy=523N
ΣFy=0
1080+523+FAy=0
FAy=-1603N
z eksenindeki kuvvetler için;
ΣMA=0
-1870*195+FBz*210=0
FBz=1736N
ΣFz=0
1870+FAz+1736=0
FAz=-3606N
Bileşke Kuvvetler
Radyal kuvveti bulmak için yatak kuvvetlerinin bileşkesini alıyoruz.
FAr=3946N
A yatağı sabit
yatak olduğundan eksenel kuvvette bu yatak tarafından taşınır.
FAe=960N
B yatağı için radyal kuvvet:
FBr=1813N
Yatak Ömürleri
A yatağının ömrü: FAeş=X*FAr+Y*FAe
X=Dinamik radyal yük katsayısı
Y=Dinamik eksenel yük katsayısı
(Buradaki X ve Y katsayıları için ORS RULMAN KATALOĞU’ nda
kombine yükler için dinamik yük faktörleri tablosunu (sayfa 37) inceleyeceğiz.
Burada kullanılan rulmanın tek sıralı rulman olması hasebiyle Tek Sıralı Radyal
Rulman bölümünü ele alacağız.
Tek sıralı radyal rulmanlarda eksenel yük, yük oranı FA(Fe)/Fr> e olduğu takdirde dikkate alınır. ‘e’ değeri, (sınır yük oranı) bir rulmanın iç yapısı için karakteristik bir değerdir. Yük oranları FA(Fe)/Fr ≤ e için X=1 ve Y=0 , yani uygulanan yük radyal yüke eşit olmakla beraber eksenel yükün etkisi yoktur.
FAe/Co=960/21600=0,044/Co=960/21600=0,044 için e=? Burada tablodan hangi değerler arasında olduğuna bakacağız. (Co değerine; Rulman 6308, yani yatak dizisi 63 delik sayısı 08 için Makine Elemanları ve Konstrüksiyon Örnekleri Kitabı’nın 505. sayfasından bakıyoruz.)
ORS RULMAN KATALOĞU SAYFA 37 TEK SIRALI RULMANLARA AİT ‘e’ DEĞERİNE KARŞILIK GELEN X VE Y DEĞERLERİ Not: Burada elimizdeki rulman 6308 olduğuna göre Rulman tipi 63′ e karşılık gelen bölümde incelemelerimizi yapacağız.
e»0,243 olarak bulunmuştur.
FA≤e olduğunu görüyoruz. Bu sebepten dolayıdır ki, X=1 ve Y=0 aldık.
Rulmanlara gelen bileşke kuvvetleri FAeş=3946N ve FBeş=1813N olarak netleşmiş durumda.
A yatağı için ömür hesabı:
Burada rulmana uygulanan F kuvvetinin 3946N olarak bulmuştuk. P değerini ise bilyalı rulman olduğundan 3 alacağız. C değerini bulurken bize verdiği rulmanın cinsi 6308 olduğu için Makine Elemanları ve Konstrüksiyon Örnekleri Kitabı (Fatih C. Babalık & Kadir Çavdar)’nın 505. Sayfasından yatak dizisi 63, delik sayısı ise 08 olduğunu anladığımız rulmanın bu değere karşılık gelen Dinamik Yük Sayısı değerinin 31000N olarak formülde yerine yazıyoruz.
A yatağının ömrünü 484,86 milyon devir olarak bulduktan sonra soruda bizlere B’de A ile aynı ömre sahip rulman seçmemizi istediği için B’deki rulmanın sahip olması gereken Dinamik Yük Sayısı değerini bulmamız gerekli ki iki noktadaki rulmanların ömürleri birbirine eşit olsun.
Bu formülden B noktasındaki rulmanın sahip olması gereken dinamik yük sayısının minimum 14243N olduğunu buluyoruz.
Daha sonra B noktasındaki Rulman için çapın 30mm olduğunu sorudan müşahede ediyoruz. Çapın 30 milimetre olduğu durumda seçebileceğimiz Dinamik Yük Sayısı değeri için yine Makine Elemanları ve Konstrüksiyon Örnekleri Kitabının 505. Sayfasından d=30 mm’ye karşılık gelen satırı ele alacağız. Bu satırdan sırası ile gittiğimizde Dinamik Yük Sayısı değerlerinin giderek arttığını ancak bizim için en uygun değerin C=14243N değerinin üzerinde olup bu değeri çok da aşmaması gerektiğini biliyoruz. Bu noktadan hareketle Yatak Dizisi 62 olan bölümde Dinamik Yük Sayısının 15kN olduğunu gördük. Bundan daha yüksek yatak dizileri için daha yüksek dinamik yük sayıları olduğunu biliyoruz ancak bu değerler maliyet açısından bizleri zora düşürecektir. Bu sebepten dolayıdır ki C=15kN’ da karar kıldık.
Yatak dizisi 62 olup d=30mm’ ye karşılık gelen delik sayısı da 06 olduğundan dolayı rulmanımızın ismi 6206 olacaktır.
ÖRNEK SORU 2
A ve B yatakları için 6007 numaralı rulman kullanılarak mil 900 devir/dakika ile dönmekle A serbest B sabit ise yatak ömürlerini hesaplayın.
Ft=1100N
Fr=800N
Fe=400N
r1=30mm r2=70mm
x düzlemindeki tepki kuvvetleri
ΣMB=0
-FAx*200+Fe*70+Fr*110=0
FAx=580N
ΣFx=0
580+FBx-800=0
FBx=220N
y düzlemindeki tepki kuvvetleri
ΣMB=0
-FAy*200+Ft*110=0
FAy=605N
ΣFy=0
FBy=Ft-FAy=1100-605
FBy=495N
Bileşke Kuvvetler
FA=838N
FB=542N
Yatak Ömürleri
B yatağı için,
FBeş=X*Fr+Y*Fa
Fe/Co=400/8500=0,047
Şimdi yukarıda görüldüğü gibi eksenel kuvvetin statik yük katsayısına bölümü ile elde ettiğimiz sonucu ‘e’ değerini bulmak için kullanacağız.
e»0,25
Yukarıda
görüldüğü gibi eksenel kuvvetin radyal kuvvete bölümü ile elde ettiğimiz değer,
‘e’ değerinden büyük gözüküyor. Bu sebepten dolayı X ve Y değerlerini 1 ve 0
olarak değil, tablodan okuyacağımız değerlerle belirleyeceğiz. Tabloya
baktığımızda ise, X değeri 0,56 olarak gözümüze çarpmakta, Y değeri ise tabloda
belirtilen aralıkta yer almaktadır. Bu noktadan hareketle Y değerini aynı ‘e’
değerinin bulunması gibi bulacağız.
X=0,56
Y için,
Y=1,7
FBeş=0,56*542+1,7*400
FBeş=1015,52N X ve Y değerlerinin bulunmasının ardından B noktası üzerindeki Eşdeğer Yük miktarını da formülde yerine koyarak buluyoruz. Tüm bunların ardından B yatağının ömrünü bulabilmemiz için 6007 numaralı rulmanın C değerine Makine Elemanları ve Konstrüksiyon Örnekleri Kitabının 505. Sayfasından bakıp formülde yerine yazacağız.
CO=Statik Yük Sayısı=> (Dönme hızının 10 devir/dakika’ dan daha az olduğu hallere için kullanılır.)
C=Dinamik Yük Sayısı
Rulmanlı yatakların seçimi:
Nominal Ömür (L),
Dinamik Yük Sayısı (C) ve
Eşdeğer Yük
olmak üzere 3 faktöre bağlı olarak yapılır.
P: Bilyalı rulmanlar için 3,
Makaralı rulmanlar için 10/3 alınır.
F: Eşdeğer Yük
L:106 dönme sayısına karşılık gelen ömür
Nominal Ömür= Aynı rulmanlı yataklardan oluşan bir gruba ait olmakla beraber o gruptaki yatakların %90’ının ulaştığı veya aştığı ömürdür.
n: devir/dakika
Dinamik Yük Sayısı: Rulmanlı Yatakların milyon devirlik bir nominal devire ulaştığı yük olarak ifade edilir.
Eşdeğer Yük: Rulmanlı yatakları aynı anda hem radyal hem eksenel (Fa) kuvvetleri ile zorlanabilir.
ÖRNEK-1
10 000 saat ömür biçilen silindirik makaralı rulman 25 kN radyal yük taşıyacaktır. Çalışma devri 1500 devir/dakika ise rulmanın sahip olması gereken dinamik yük sayısının en küçük değeri kaçtır?
L=10000h 1500devir/dakika 60 dakika/h
L=900*106 devir
Konik olduğu için P=10/3 olur. Daha sonra formüldeki C
değerine (dinamik yük sayısına) bakılacak.
C=192 403N≅192,4 kN
ÖRNEK-2
75 mm çapındaki bir mile gelen radyal yük 5000 N’dur. Sabit bilyalı rulman ile yataklanan ve 300 devir/dakika ile dönen mile yatak ömrünün 10 000 saat olması için hangi rulmanı seçeriz?
Sabit bilyalı dediği için P=3 L=10000h×300devir/dakika×60dakika=180×106 devir
Daha sonra dinamik yük katsayısı değerini bulabilmek için örnekte bize verdiği d=75 mm değeri ile, Makine Elemanları ve Konstrüksiyon Örnekleri (Fatih C. Babalık& Kadir Çavdar) kitabının 505. Sayfasından bu değere karşılık gelen C (Dinamik yük katsayısı) ifadesini bulup formülde yerine yazıyoruz.
Yatak dizisinin 160 seçildiği durumdaki rulman ömrü 68×10^6 devir olup, rulmanın belirtilen ömrünü karşılamamaktadır. Bu yüzden yatak dizisinin 60 olduğu durumdaki C=30,5 kN değerini göz önüne alacağız.
Evet, yatak dizisi değerini 60 olarak
seçtiğimizde karşımıza çıkan rulman ömrü 226,9 olup, rulmanın belirtilen ömrünü
karşılamaktadır.
Şimdi biz burada rulmana isim verirken yatak dizisi 60 ve delik sayısını da Tablo 18.1’den 15 olarak elde ettiğimiz için bu rulmanın ismi Rulman 6015’dir.
ÖRNEK-3
Rulman 6320 100kN Yük taşıyacaktır bu yükü ne kadar süre taşır?
Soruda bize rulmanın ismini 6320 olarak vermesi demek,
rulmanın yatak dizisinin 63, delik sayısının ise 20 olması demektir.
Soruda bize uygulanan F kuvvetinin 100kN olduğunu ve bu
kuvvet karşısında ne kadar süre dayanacağını yani L’sini (devir miktarını) sormaktadır.
Makine Elemanları ve Konstrüksiyon Örnekleri
(Fatih C. Babalık& Kadir Çavdar) kitabının 505. Sayfasından delik sayısı 20,
yatak dizisi 63 için,
Ortalama gerilme değişince Wöhler Eğrisi de değişir. Wöhler Eğrilerinin ortalama gerilme ve sürekli mukavemet değerleri Smith Diyagramı da denilen süreklimukavemet diyagramında gösterilir. Elde edilen bu diyagram sayesinde herhangi bir ortalama gerilme değeri için gerilme genliği, maksimum ve minimum gerilme değerleri diyagramdan okunabilir.
Eğer, hesaplanan gerilme değerleri diyagram içinde alırsa numune sonsuz ömürlü, diyagram dışında kalırsa sonlu ömürlüdür.
SMİTH DİYAGRAMI ÇİZİMİ
Sürekli Mukavemet ve Ortalama Gerilme değerleri aynı ölçekte olacak şekilde koordinat sisteminde gösterilir. Sıfır noktasından 45° derece açıyla bir doğru çizilir.
Malzemenin akma noktası (σakma) işaretlenir
σakmanoktasından σortalamaeksenine paralel çizilir.
Malzemenin tam değişken sürekli mukavemet değeri σTD , devamında -σTDeksen üzerine yerleştirilir.
σTD den α açısına sahip doğru σakmadoğrusunu kesene kadar çizilir.
α;
çeki-bası için=40°
eğilme için=36°
burulma için=42°
A noktasından σortalama eksenine paralel olacak şekilde ve gerilme doğrusunu kesen doğru çizilir.
A noktasındaki genlik kadar C noktasında düşey yönde doğru çizilir. (Ortalama gerilme doğrusundan Smith Diyagramına kadar olan, y eksenine paralel olup giderek küçülen çizgilere genlik denir.)
En son olarak B, D ve -σTD noktalarından doğrular birleştirilerek Smith Diyagramı kapatılır.
ÖRNEK SORU
Islah çeliği C35’ den üretilmiş 60 mm çapındaki aks tam
ortasından radyal yönde 5000N±1000N değerinde kuvvetle zorlanıyor.
Aks üzerinde açılan kama yuvası β=2 değerinde bir çentik etkisi
oluşturuyor ise bu aks sürekli mukavim midir?
b1 -> yüzey faktörü=0.95
Çözüm:
Yüzey pürüzlülüğü belli bir ortalama gerilmede parçanın
taşıyabileceği gerilme genliği üst yüzey kalitesine bağlıdır.
Pürüzlülük arttıkça gerilme genliği de azalır.
Çentik faktörü, bir makine elemanı üzerindeki kama yuvası,
fatura vb. süreksizlikleri mukavemet düşürücü etkisi çentik faktörü ile göz
önüne alınır.
Parça büyüklüğü etkeni
11metreden daha büyük kesitler için mukavemet düşürücü etki,
büyüklük faktörü b0 ile göz önünde bulundurulur.
Dinamik Eğilme
Momenti=> Memaksgenlik=(F*L)/4=(±1000*1600)/4
Memaksgenlik=±0.4*106 Nmm
Eğilme Gerilmesi=>
(Me*y)/Je
Je=(π*d4)/64=(π*604)/64
=636172,5 mm4
Gemaks=>(2*106*30)/636172,5mm4
=94,3MPa
Gemaksgenlik=(±0,4*106*30)/636172,5mm4
=±18,86MPa
Matematiksel hesaplamalarla maksimum gerilmeyi ve bu gerilmenin genlik miktarını elde ettik. Burada Mühendislik Mekaniği dersindeki elde ettiğimiz bilgileri kullandık.
Şimdi Makine Elemanları ve Konstrüksiyon Örnekleri ( Fatih C. Babalık & Kadir Çavdar) kaynak kitabından C35 ıslah çeliğinin Smith Diyagramına bakıp buradaki değerleri yaklaşık olarak elde edip kendi Smith Diyagramımızı oluşturacağız.
Kitaptan Bakılarak Elde Edilen 1. Diyagram
2. Diyagramı elde etmek için ise yine Makine Elemanları ve Konstrüksiyon Örnekleri ( Fatih C. Babalık & Kadir Çavdar) kitabındaki Tablo 3.16′ dan malzemenin milimetrik çapına göre verilen b0 (büyüklük faktörü) değerini okuyup 1. Diyagramdaki akma gerilmesi ( σakma ) ve tam değişken gerilmesi ile çarpıp yeni değerlerimizi elde edeceğiz. Elde ettiğimiz bu değerleri ise diyagramda yerine koyup 2. Diyagramımızı çizmiş olacağız.
σakma’=b0* σakma=0,8*530=424MPa
σTD’=b0* σTD=0,8*320=256MPa
Büyüklük Faktörünün Etkisiyle Oluşturulmuş 3. Diyagram
İlk olarak σTD’’ yi bulmak için bir önceki diyagramdaki
σTD’ değerini (b1/ β) değeriyle çarpacağız.
σTD’’= σTD’*(b1/ β) = 256*(0,95/2)»122Mpa
Daha sonra 2.Diyagramın genlik değeri okunur.
σgk= 424-234 = 190MPa
Son olarak 3. Diyagramın genlik değerini bulmalıyız. Bunun için 2.
Diyagramdaki genlik değerini yine (b1/ β) değeriyle çarpacağız.
σgk’= σgk*(b1/ β)=190*(0,95/2)=90MPa
b1 (yüzey faktörü) ve β (çentik etkisi) değerlerinin etkisiyle oluşturulan 3. Diyagram
Tüm bunları yaptıktan sonra sistemin mukavim olup olmadığını bulmak için Maksimum Gerilme Değerini diyagram üzerine yerleştirip. Genlik miktarı ile birlikte ölçümümüzü yapacağız. En nihayetinde de bu sistemin mukavim olup olmaması noktasında bir karara varacağız.
Maksimum Gerilme Değeri=94,3 MPa
Genlik Değeri=18,86 MPa
94,3+18,86=113,16 MPa
113MPa+90MPa=203MPa
234MPa > 203,16MPa=> Sistem Smith Diyagramının içerisinde olduğundan mukavimdir ve sonsuz ömürlüdür.