
Doğru akım (DA veya direct current DC) motor DC elektrik enerjisini mekanik enerjiye çevirir. DC motorlar DC generatör olarak da çalışabilirler. Çünkü yapıları aynıdır. Bu yüzden DC generatör için uygulanan modeller motor için de uygulanabilir. Model dikkate alındığında farklılık temel endüvi gerilimindedir. Generatör durumunda endüvinin ürettiği endüklenen gerilim (Eg), motor durumunda endüvide meydana gelen zıt emk (Ec) olarak adlandırılır.
ENDÜVİ DEVRESİ MODELİ
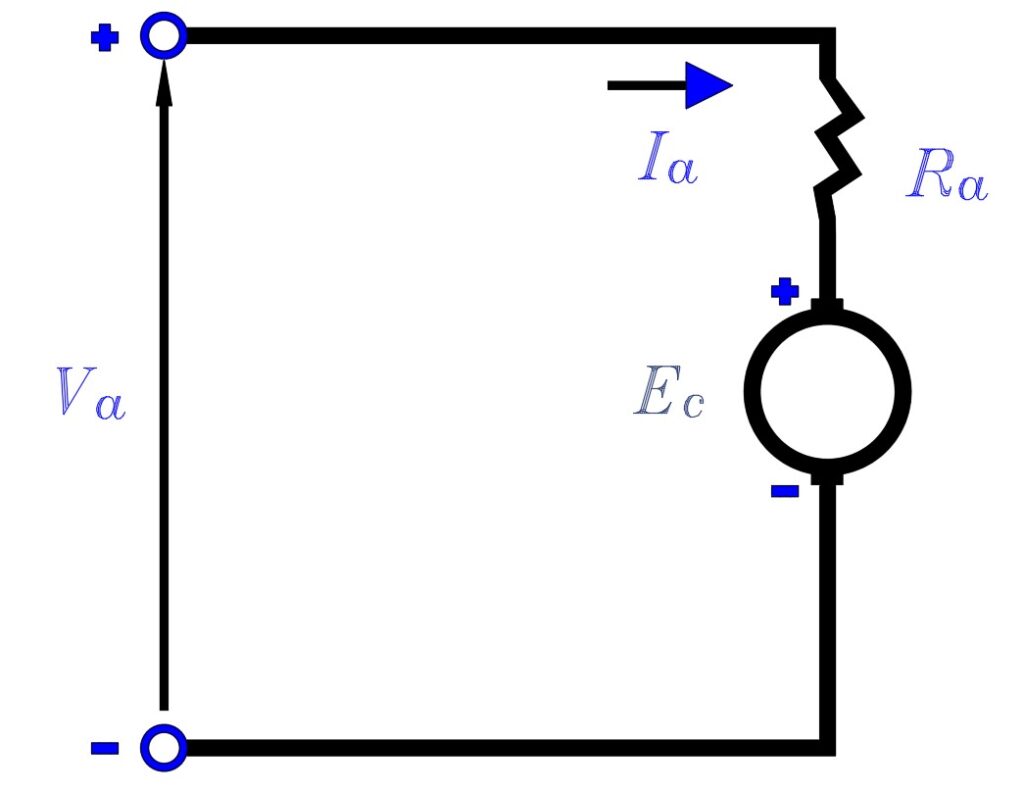
DC motorun endüvi devresi yukarıdaki model ile temsil edilir. Endüviye uygulanan gerilim (Va), zıt emk (Ec), endüvi sargısı direnci (Ra) ile temsil edilir.
Kullanılarak endüvi akımı hesaplanır. Zıt emk; alan akısı ve endüvi açısal hızı ω veya devir sayısı n ile değişir.
K1 sabiti; endüvideki iletken sayısı, kutup sayısı gibi makine parametlerine bağlıdır.
Motor dururken, motor devir sayısının ω=0 ve böylece yol alma başlangıcında motor zıt emk’nın Ec=0 olduğu görülür.
Eğer Va geriliminin azaltılmış bir değeri endüviye uygulanmazsa yolalma başlangıcında endüvi akımı çok yüksek olacaktır. Bu duruma özel bir önem verilmeli ve dikkat edilmelidir.
Endüvi devresine giren güç;
Endüvi güç kayıplarını ve endüvi gücünü karşılar.
Endüvide üretilen güç Pa ;
Net çıkış gücü (Po) ise endüvi gücünden döner kayıpların (Prot) çıkarılması sonucu elde edilir.
Net çıkış gücü motor milinden elde edilen güçtür. Newton-metre olarak net çıkış momenti;
Denkleminden hesaplanır. Burada ω açısal hızdır ve birimi rad/s’ dir.
ÖRNEK:
Endüvisine 220 volt uygulanan bir DA seri motorda tam yük endüvi akımı Ia=200A’dir. Endüvi direnci 0.2Ω’dur. Zıt emk’i, net çıkış gcünü ve 1750 d/d tam yük devrindeki döner kayıpları 1420W kabul ederek çıkış momentini hesaplayınız.
ÇÖZÜM:
Va=220V Ia=200A
Zıt emk;
Ec= Va-IaRa=220-200(0.2)=180V
Endüvide üretilen güç;
Pa=EcIa=36000W=36kW
Net çıkış gücü endüvi gücünden döner kayıplar çıkarılarak elde edilir.
Po=Pa-Prot=36000-1420=34580W
Net çıkış momenti;
To=Po/ω=34580W/[(2π/60)1750]=188.7Nm
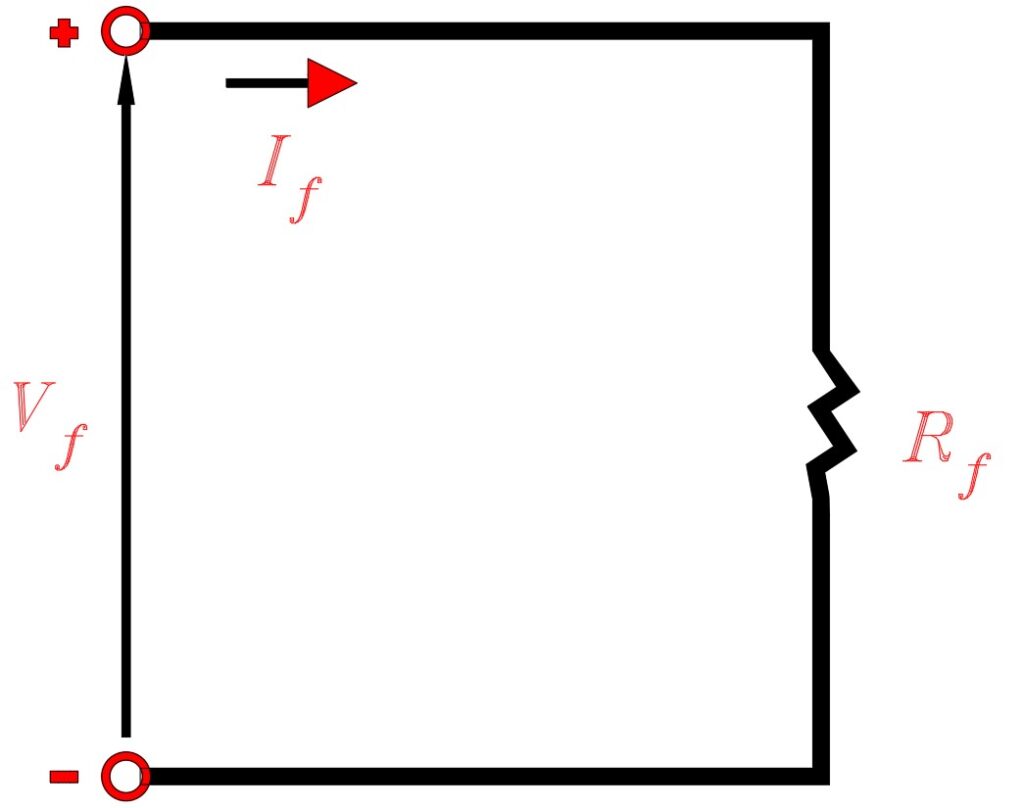
UYARTIM DEVRESİ MODELİ
DC motorun tam bir performans analizini yapabilmek için uyartım devresinin endüvi devresine bağlantı şeklinin bilinmesi gerekir. Aşağıdaki modelde gösterildiği gibi uyartım devresi bir DC kaynağı (Vf)
Ve alan sargısını temsil eden bir direnç (Rf) ile modellenir.
Yukardaki modelde verilen zıt emk uyartım akısına bağlıdır. Elektrik makinelerinde kullanılan manyetik malzemelerin mıknatıslama karakteristiği DC makinelerin uyartım kutupları için de geçerlidir. Kutupların hem doğrusal hem de doyum bölgeleri vardır. Ancak alan akısının uyartım akımı ile orantılı olarak değiştiğini kabul etmek yaygın bir uygulamadır.
Burada If uyartım akımı, фf ise kutup akısıdır.. Zıt elektromotor kuvveti (emk) ise
Olarak tanımlanır.
DC seri motorda alan sargısı endüvi sargısına seri olarak bağlanır. Şönt motorda ise alan sargısı endüvi sargısına paralel bağlanır. Bu iki bağlantının kombinasyonundan DC kompunt motor elde edilir.